基于CAN總線的分布式電動型AMT系統

經過多次的調試、參數整定,得到了較好的PID控制效果。圖4 是基于M68HC908GZ16 芯片的控制節點控制換檔機構,針對實際階躍輸入的響應圖,其中采樣周期T = 10 ms。從圖中可以看出,整個控制節點構成了一個完整的反饋控制系統,可以準確地將CAN 總線上輸入作為給定量,快速準確地調整換檔機構到達指定位置。
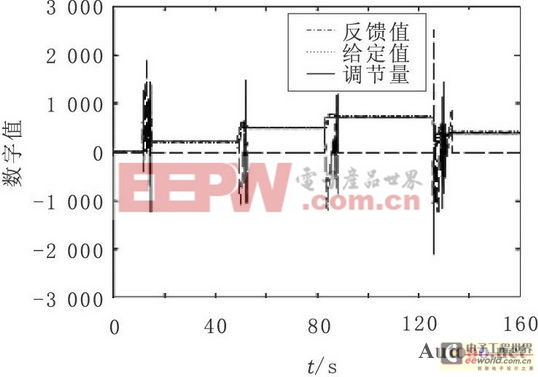
圖4 AMT 控制節點階躍響應控制效果
基于CAN 總線的分布式控制系統的開發工作,已被初步證明在技術上較集中控制是更加可行有效的,同時也是很經濟的。AMT 控制采用基于CAN 總線的分布式控制系統的優點:
a. 有效減少了電機驅動電流在線路上的銅損,減少了故障發生的概率,提高系統的可靠性。
b. 利用CAN 總線實現信號傳輸全數字化,縮短了模擬信號傳輸距離,保證系統控制的準確性。
c. 該系統的控制單元全部分散到現場,控制回路由現場控制器實現,提高了控制的動態性能。
d. 現場總線中允許ECU 根據車況用數字通訊的方式對現場控制節點進行操作和調整,易于實現優化控制策略。
綜上所述,基于CAN 總線的分布式全電動型結構非常適合于公交大客車AMT 系統。該系統利用CAN 作為汽車計算機網絡總線,使AMT 各控制單元能夠共享所有信息和資源,達到簡化布線、提高系統可靠性和維護性、降低成本的目的。按照以上思路解決了全電動AMT 系統設計的技術難題,結合微電子技術,在總體傳動結構不變的情況下通過加裝微機控制的自動操縱系統來實現換擋的自動化。既保留了原齒輪變速器傳動效率高、結構簡單的長處,又以較小的代價具有了液力自動變速器的自動換檔性能。
參考文獻:
[1 ] 劉巖,丁玉蘭. 電控機械式自動變速器控制系統的研究[J ] . 重型汽車,2001 , (1) :12 - 13.
[2 ] 盧永生. AMT 自動換檔變速器在城市客車上的應用[J ] . 客車技術與研究,2006 ,28 (1) :41 - 43.
[3 ] 盧新田, 侯國政. AMT 控制系統結構及國外主要AMT 產品介紹[J ] . 汽車技術,2004 , (5) :19 - 22.
[4 ] 侯培國,韓向芹. 電控機械式自動變速器控制系統的研究[J ] . 傳感技術學報,2005 ,18 (2) :296 - 299.
[5 ] 劉海鷗,陳慧巖,金亞英,等. 液壓式離合器操縱機構在AMT 車輛中的控制研究[J ] . 液壓與氣動,2005 , (10) : 18 - 20.
[6 ] 任玉平,葛安林. 全電式AMT 選換擋系統模糊控制方法[J ] . 汽車技術,2004 , (8) :11 - 14.
[7 ] 黃向東,汪勝勇,趙克剛,等. 基于CAN 總線的HEV集散控制系統的通信[J ] . 華南理工大學學報(自然科學版) ,2004 ,32 (5) :88 - 91.









評論