現場總線、模糊神經網絡在回轉窯分解爐溫度控制中的應用

第3層為模糊規則層,根據第2層的輸入,可以按下式計算第m條規則的信用度

當a為∞時,該運算相當于一般最小化運算,當a為有限值時將得到輸入的一個可微函數。該層的輸入輸出可以表示如下:

第4層為去模糊輸出層,每條規則在模糊集中的輸出可表示為

式中?為語言變量集(比如正大、正小等),被激活的規則對最后的輸出影響加權平均得到轉速的精確控制量可表示如下:

在設計過程中,模糊規則庫的建立是整個系統設計的關鍵。模糊規則庫建立的常用方法是根據工藝操作規程對操作人員的經驗進行總結。抽取相應的模糊規則,這種方法較為簡便,但獲得的規則較為粗糙;另一種方法是應用系統辨識技術,根據輸入輸出數據建立對象的模糊模型,再根據模糊模型提取相應的模糊控制規則。該文采用的是先建立對象的模型,再提取模糊控制規則,同時借鑒操作人員經驗和現場控制情況對控制規則作適當修改,自動生成規則模塊,根據模糊規則庫,經過在線分析訓練后,得出最優控制規則。具體運算步驟如下:
在讀入e,ec值后,經過初始運算,對所有規則Rm逐一判斷、刪除,信用強度小于某一閾值的規則和明顯與預期結論相矛盾的規則,經上一步的篩選后,規則將能輸出正確的符號,但不少規則還具有相同的前提,需要對規則進行進一步優化。假設經篩選后剩下的R條規則可分成n組R1,R2…Rn,同一組規則Ri(1≤i≤n)都具有相同的前提,Ri(j)表示Ri(1≤j≤1i)中的某一條規則,1i是每組的總規則數,每組中規則的總數不一定相等,優化的具體步驟如下:(1)獲得系統狀態e和ec;(2)在前提相同的每個規則組Ri中,隨機選擇1條規則Ri(j),n組共選擇n條規則;(3)模糊神經網絡控制模塊計算每條規則的輸出:,n條規則的總輸出Δn;(4)可按下式計算由所選各條規則產生的誤差:

其中WRi(j)表示各條規則Rj(k)的信用度,bi(j)為第Ri(k)條規則的輸出,Δnmax和Δnmin分別為輸出轉速可能的最大值和最小值;(5)累計每次迭代后的各條規則的Ri(j)的ERi(j);(6)將輸出作用到執行器獲取新的e和ec;(7)返回第一步,繼續迭取規則組中的一條規則;(8)在前提相同的規則組中僅保留累計誤差ER(j)最小的規則,由此得到一組優化控制規則。
在本系統中定義爐溫偏差e,爐溫偏差變化率ec和輸出喂料誤差電機轉速增強Δn。輸入變量e的論域為[-30℃,30℃],語言值為{負大,負中,負小,負零,零,正零,正小,正中,正大},記作{NL,NM,NS,NZ,ZO,PZ,PS,PM,PL};ec的論域為[-30,30],語言值為{負大,負小,零,正小,正大},記作{NL,NS,ZO,PS,PL};Δn的論域為[-20%,20%],語言值為{負大,負中,負小,零,正小,正中,正大},記作{NL,NM,NS,NO,PS,PM,PL}。表3―1是由模糊網絡控制器產生的一組優化控制規則表。

4 現場總線控制系統的實現
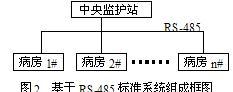
采用Lonworks節點完成回轉窯分解爐的溫度控制,將控制節點連接安置在現場,只需通過一根雙絞線就可完成現場各節點之間以及與上位機之間的信息通訊(如圖4―1),在這里應用了4個節點,它們分別是傳感器輸入節點、控制器節點、執行器節點、顯示節點。傳感器節點完成現場溫度值的網絡變量輸出;控制器具體實施模糊神經網絡控制算法,并輸出修正的網絡變量;執行器驅動電閥工作;顯示節點完成溫度設定值的輸出及當前溫度的動態顯示。網絡變量的概念大大簡化了復雜應用程序的設計,使節點程序的可利用性提高,節點間的虛擬連接關系得到加強,使其添加、移動、改變均方便易行,每個節點中的數據可與整個網絡中的所有節點共享;另外上位機通過Lonworks網卡便可實現與所有現場節點的通訊,通過工控組態軟件(citech或Intouch)完成對整個系統的監控并可嵌入一些高級控制功能。

5 結束語
在水泥回轉窯生產過程中采用現場總線技術、模糊神經網絡控制技術,建立了Lonworks智能節點的模糊神經網絡溫度控制系統,分散的節點不僅有效地實現了模糊控制功能,而且系統的整體性得到提高;特別是采用模糊神經控制等策略后,取得了良好的效果,爐溫基本穩定在850℃左右,滿足了生產要求。對比采用PID控制等,控制效果非常明顯。
分散智能控制網絡系統是過程控制技術、儀表工業技術和計算機網絡技術三者的結合,它代表了工業控制體系結構發展的一種方向。

評論