總線式車身控制系統的規則化建模方法


從以上的分析可以看出,用有限自動機模型對車身控制系統進行建模,系統的狀態數存在狀態組合復雜性問題。另外,用有限自動機進行建模,在系統所處的每1個狀態上,任何時刻最多只執行1個操作,即只能描述順序系統,而無并發描述能力,但車身控制系統中存在大量并發事件和并發行為。
針對用有限自動機模型對車身控制系統進行建模所存在的問題,作者提出一種新的車身控制系統的建模和設計方法―規則化描述方法。
規則化描述方法引入分層建模機制,將組成系統的對象分解為多層,建立系統對象的樹狀層次模型,用邏輯規則表達式描述系統對象之間的邏輯控制關系,用消息來傳遞控制關系。系統的控制任務被劃分為多個子任務,分布到組成系統的各層對象中,從而有效地減小系統控制的復雜性。用消息機制可方便地實現對并發事件和并發行為的處理。
四、分層建模機制
采用規則化描述方法對車身控制系統進行建模,為降低系統設計的復雜性,將系統對象分解為部件和接口兩層。將系統的對象按照組成關系進行分為多個子空間。對系統的劃分遵循“高內聚、低耦合”的原則,從而有效降低控制的復雜性。系統的控制任務被劃分為多個子任務,分布到組成系統的各層對象中。高層對象充當管理器的角色,協調系統各個組成部分之間的控制任務;低層是傳感器和執行器等,直接與外界進行交互,傳感器實時感知環境信息并遞交給高層對象,執行器主要用來把控制器的指令變換為實際的物理動作并作用于環境。系統各層對象之間存在著邏輯控制關系,對象之間的邏輯控制關系通過消息進行傳遞,由低層發送到高層的是通告消息,由高層發送到低層的是控制(命令)消息。
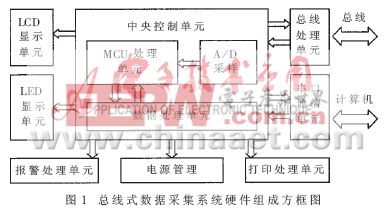
車身控制系統由多個部件組成,每個部件包含一個或多個接口,形成如圖1所示的樹狀層次模型。
其中部件是對系統中每個在功能上相對獨立的器件的邏輯抽象,接口是對控制單元I/O口的抽象。例如:汽車的前照燈由左右2只組成,在非故障情況下它們始終是同亮同滅,便可在邏輯上將其定義為“前照燈”一個部件;前照燈又有遠光、近光、開關等正常狀態和開路、短路等故障狀態。部件以及接口之間存在著邏輯控制關系,包括部件與部件之間、部件與接口之間、接口與接口之間的邏輯關系,將這種邏輯關系采用形式化的邏輯規則表達式來描述。
五、邏輯控制關系的規則描述
車身控制系統的狀態由組成系統的所有部件和接口的狀態的集合決定,事件引發系統狀態變化,也即導致部件和接口的狀態改變,如何改變和變化的過程由部件和接口的邏輯控制關系決定。邏輯控制關系由邏輯規則表達式描述,系統狀態的變化體現為邏輯控制關系以消息的方式在部件和接口之間進行傳遞(當邏輯控制關系所涉及的2個部件位于不同的控制單元中時,控制消息通過CAN進行傳送),并觸發相應部件和接口的狀態改變。
邏輯規則表達式,簡稱規則式,是對部件和接口的邏輯關系的形式化表示。邏輯規則表達式可以看作為ECA規則的簡化。一條ECA規則可表示為

式中E、C、A分別為規則的事件、條件和動作;P為描述規則行為或狀態的附加性質。
ECA規則的職能是:當規則事件發生時,系統實時地或在規定時刻檢查規則的條件,如滿足則執行規則的動作。
車身控制系統中的事件由用戶操作或傳感器檢測觸發,并引發相應器件狀態的變化,因此事件在表達式中也可以作為條件進行處理,從而可以使表達式得到簡化。
采用Backus Naur范式語法表示方法,給出邏輯規則表達式的形式化定義如下。
定義1(邏輯規則表達式)
邏輯規則表達式::=左件→右件
左件::=因子|因子左件
右件::=因子|因子右件
即邏輯規則表達式的一般形式為
因子因子?因子→因子因子?因子
表達式中符號“→”左邊的部分稱為邏輯規則表達式的左件,其右邊的部分稱為邏輯規則表達式的右件。左件和右件均由因子組成,當因子不止1個時,中間用“”相連,表示“邏輯與”。左件因子是條件因子,右件因子是響應因子。
定義1給出邏輯規則表達式的語法形式,語義是:如果左件為真,即左件中所有的條件因子均為真,也即條件符合,則執行右件,即執行各響應因子。

評論