一種ESP電子車(chē)身穩(wěn)定系統(tǒng)地模擬設(shè)計(jì)

為了演示ESP在提高汽車(chē)操縱穩(wěn)定性方面的作用,結(jié)合電子專業(yè)的技術(shù)知識(shí),通過(guò)設(shè)計(jì)電路圖以及對(duì)電路圖的仿真,并應(yīng)用相關(guān)電手元器件,在玩具小車(chē)上模擬ESP的預(yù)險(xiǎn)警示爭(zhēng)主動(dòng)控制功能,實(shí)物運(yùn)行效果良好。該設(shè)計(jì)思路和方法推廣應(yīng)用可使更多學(xué)生受益。
0 引言
ESP(Electronic Stability Program)是一種主動(dòng)的智能安全系統(tǒng),通過(guò)高度靈敏的傳感器時(shí)刻監(jiān)測(cè)汽車(chē)的行駛狀態(tài),及時(shí)識(shí)別危險(xiǎn)情況,使汽車(chē)恢復(fù)行使的穩(wěn)定。ESP系統(tǒng)最早由德國(guó)博世(BOSCH)公司于1997年研制成功,該公司的統(tǒng)計(jì)表明ESP在汽車(chē)上的應(yīng)用使乘用車(chē)的交通事故率降低了20%~50%。近年來(lái)ESP在行車(chē)方面的卓越功效越來(lái)越得到人們的認(rèn)可,世界范圍內(nèi)新車(chē)的ESP裝配率顯著的提高,根據(jù)德國(guó)博世公司的統(tǒng)計(jì),2005年德國(guó)新車(chē)ESP裝配率約為72%,西歐的新車(chē)平均裝配率約為44%,北美約為21%,日本約為15%,在2006年,我們國(guó)內(nèi)的ESP的裝配率只有3%,遠(yuǎn)遠(yuǎn)低于歐美地區(qū)。而在2012年的今天,國(guó)內(nèi)車(chē)輛的ESP裝備情況仍然不容樂(lè)觀,只有18%,僅達(dá)到韓國(guó)2006年的水平。相比于國(guó)外,國(guó)內(nèi)汽車(chē)行業(yè)對(duì)汽車(chē)動(dòng)力學(xué)穩(wěn)定性控制的研究起步較晚,國(guó)內(nèi)ESP的裝配率還比較低,由于科學(xué)技術(shù)水平的差距,大多數(shù)學(xué)者對(duì)ESP的研究也只是停留理論研究和模擬仿真解決ESP系統(tǒng)的設(shè)計(jì)中所具體遇到的問(wèn)題。同樣,這部分市場(chǎng)也完全掌握在外資企業(yè)手中,國(guó)內(nèi)企業(yè)幾乎無(wú)法涉足,所以,要努力攻克ESP設(shè)計(jì)的理論與關(guān)鍵技術(shù),對(duì)提高國(guó)產(chǎn)汽車(chē)的自主開(kāi)發(fā)能力、縮短與發(fā)達(dá)國(guó)家的差距具有重要的現(xiàn)實(shí)意義。
本文正是基于ESP電子車(chē)身穩(wěn)定系統(tǒng)的原理,結(jié)合電子專業(yè)的技術(shù)知識(shí),通過(guò)設(shè)計(jì)電路圖以及對(duì)電路圖的仿真,從理論上達(dá)到了ESP系統(tǒng)警示駕駛員和主動(dòng)制動(dòng)汽車(chē)的目的,并且應(yīng)用相關(guān)電子元器件,在玩具小車(chē)上模擬ESP系統(tǒng)的預(yù)險(xiǎn)警示和主動(dòng)控制功能。該設(shè)計(jì)演示了ESP在提高汽車(chē)操縱穩(wěn)定性方面的作用。
1 ESP控制汽車(chē)運(yùn)動(dòng)流程
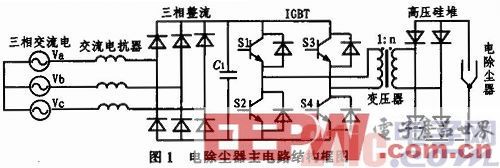
ESP電子車(chē)身穩(wěn)定系統(tǒng)是一種提高車(chē)輛曲線行駛穩(wěn)定性的主動(dòng)安全系統(tǒng)。當(dāng)出現(xiàn)異常情況時(shí),ESP會(huì)根據(jù)實(shí)際情況作出反應(yīng),而不是盲目地服從于駕駛員,使汽車(chē)行駛安全性大大提高。ESP電腦計(jì)算出保持車(chē)身穩(wěn)定的理論值,與偏轉(zhuǎn)率傳感器和橫向加速度傳感器測(cè)的的數(shù)據(jù)進(jìn)行比較,發(fā)出平衡糾偏指令,使汽車(chē)回到預(yù)定的軌道行駛,保持車(chē)輛正常行駛系統(tǒng)控制流程如圖1所示。
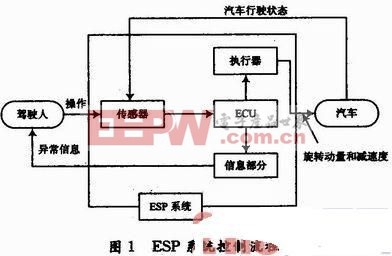
基本控制程序如下所述:
(1)汽車(chē)在正常行駛狀態(tài)下,ESP控制單元(圖中的ECU模塊)接受來(lái)自轉(zhuǎn)向盤(pán)角度傳感器和輪速傳感器的信號(hào),經(jīng)過(guò)計(jì)算和監(jiān)測(cè),獲知駕駛員操縱汽車(chē)穩(wěn)定行駛的方向信息,并儲(chǔ)存這些數(shù)據(jù)。
(2)ESP控制單元ECU同時(shí)接收來(lái)自橫擺角速度傳感器和橫向加速度傳感器的信號(hào),經(jīng)過(guò)計(jì)算,獲取實(shí)際車(chē)輛行駛的狀態(tài)。并將數(shù)據(jù)和(1)中監(jiān)測(cè)的數(shù)據(jù)進(jìn)行對(duì)比,判斷汽車(chē)此時(shí)是否處于穩(wěn)定行駛狀態(tài)(駕駛員對(duì)汽車(chē)操控行駛的方向信息和穩(wěn)定行駛的方向信息對(duì)比一致則為汽車(chē)穩(wěn)定行駛狀態(tài))。
(3)經(jīng)過(guò)對(duì)比,如若兩者信息一致,則ESP控制單元判斷汽車(chē)此時(shí)處于安全行駛的穩(wěn)定狀態(tài),ESP系統(tǒng)處于待命狀態(tài)。如若兩者信息不一致,ESP控制單元判斷汽車(chē)此時(shí)處于非穩(wěn)定行駛狀態(tài),ESP控制單元下達(dá)控制命令到執(zhí)行器(液壓調(diào)節(jié)單元),通過(guò)對(duì)發(fā)動(dòng)機(jī)的干涉,利用液壓執(zhí)行器對(duì)每個(gè)車(chē)輪進(jìn)行制動(dòng),及時(shí)糾正車(chē)輛的不穩(wěn)定行駛狀態(tài),確保人身安全。
2 ESP電子車(chē)身穗定系統(tǒng)的模擬設(shè)計(jì)
2.1 模擬設(shè)計(jì)的思路及原理分析
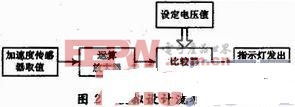
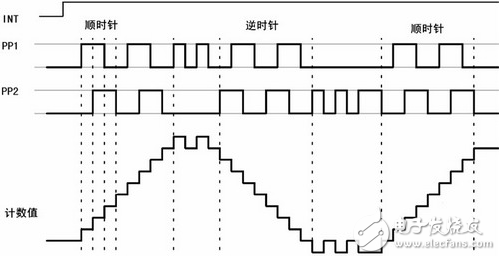
根據(jù)ESP電子車(chē)身穩(wěn)定系統(tǒng)的原理,ESP最大的特點(diǎn)在于它的主動(dòng)性,能夠在發(fā)生危險(xiǎn)時(shí)及時(shí)提醒駕駛員,起到事先提醒的作用。圖2為預(yù)警功能模塊電路板的設(shè)計(jì)流程圖,通過(guò)加速度傳感器的取值和預(yù)先設(shè)定的電壓值(模擬實(shí)際ESP系統(tǒng)電子控制單元的穩(wěn)定值)進(jìn)行比較,根據(jù)實(shí)際模型小車(chē)的行駛情況,來(lái)判斷是向左加速還是向右加速,從而通過(guò)指示燈的亮滅給駕駛員發(fā)出警告,車(chē)輛出現(xiàn)的不穩(wěn)定行駛狀態(tài)。
2.2 模擬設(shè)計(jì)的電路原理圖
在汽車(chē)的實(shí)際行駛過(guò)程中,由于各種原因出現(xiàn)側(cè)滑或者轉(zhuǎn)向過(guò)度、躲避障礙物等突發(fā)情況,ESP電子車(chē)身穩(wěn)定系統(tǒng)會(huì)主動(dòng)感知到汽車(chē)行駛的不穩(wěn)定狀態(tài),電子控制單元通過(guò)對(duì)各個(gè)傳感器采集數(shù)據(jù)的分析和判斷,主動(dòng)采取干預(yù)措施,防止發(fā)生意外事故。但在實(shí)際的測(cè)試中,由于實(shí)驗(yàn)條件的差異性,無(wú)法模擬到真實(shí)汽車(chē)在遇險(xiǎn)時(shí)的處理過(guò)程,主要是模擬小車(chē)在急速轉(zhuǎn)彎的情況下,實(shí)驗(yàn)小車(chē)出現(xiàn)不穩(wěn)定性行駛狀態(tài),ESP電子車(chē)身穩(wěn)定系統(tǒng)開(kāi)始由待命狀態(tài)進(jìn)入工作狀態(tài)。
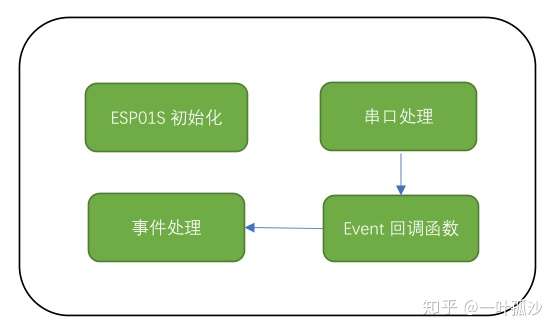
圖3是模擬處理采集信號(hào)的過(guò)程,依次對(duì)采集到的傳感器信號(hào)進(jìn)行放大、比較處理,從而通過(guò)發(fā)光LED燈來(lái)判斷實(shí)驗(yàn)小車(chē)的行駛狀態(tài)。




評(píng)論