運動控制器在包裝行業的應用

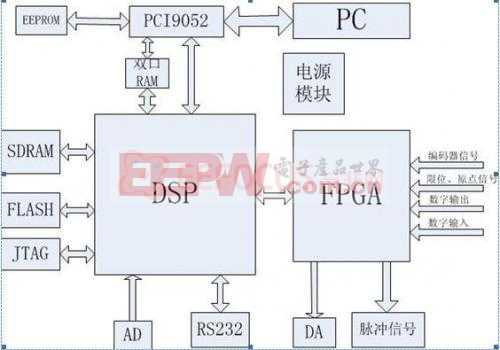
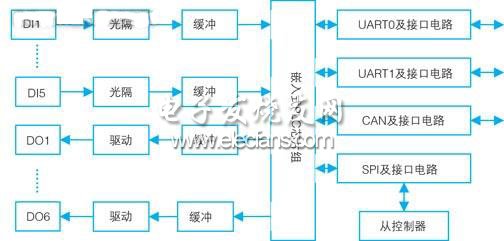
表1系統配置

4控制工藝
夾手裝置由三個伺服電機驅動,完成袋子的移送,其電子凸輪曲線如下圖示:
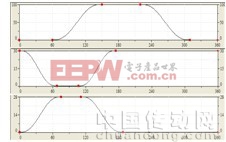
圖4夾手裝置凸輪曲線
制袋工位由一個伺服電機驅動,其凸輪曲線如圖5所示。
圖5熱封裝置凸輪曲線
拉模裝置由兩個伺服電機驅動,其凸輪曲線如圖6所示。
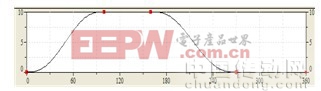
圖6拉膜裝置凸輪曲線
主軸變頻器驅動的電機上帶一個編碼器,在正常運行時,其他軸根據自己所處的位置相應做跟隨運動。放膜部分采用張力控制,使放膜輥在放膜過程中,均勻放膜。
拉膜軸通過速度控制進給包裝膜,在每送一個袋子時,通過色標作為前一次袋長檢測觸發信號,直接接入到運動控制器高速信號接口,然后通過外部編碼器讀取實際膜長,與存儲的標準長度進行比較,如果有偏差的話,就在下一包進行調整。
拉膜的寬帶通過電子凸輪實現,可以保證到整機的速度一致性,但是凸輪的曲線不能在線修改,但可使用虛軸的功能:即使用MC-VirtualAxis指令構建一個虛擬軸。虛軸是運動控制器內部可以創建的一個假想軸,專門用于位移量疊加計算進行使用,由于是理想軸,所以不會出現任何偏差,并且可以自己定義任何軌跡。這里將虛軸和實軸的凸輪曲線用電子齒輪方式嚙合,做同步,運行過程中可以修改電子齒輪的齒輪比,即可達到在線調節凸輪曲線的目的。
在停機時,拉膜裝置在完成本次拉送袋子后,立即停止。制袋裝置在拉膜裝置停止后,也立即停止,并且運動到安全位置,等待下次工作。再次運行前,制袋裝置需運行到同步的位置后,開始運行主機。
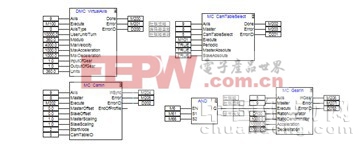
圖7拉膜裝置曲線控制
5系統通訊
5.1變頻部分
變頻器和運動控制器通訊時需要在CANopenBuilder軟件中導入ATV312的EDS文件。
DVPCOPM-SL模塊是運行于DVP10MC左側的CANopen主站模塊,當DVP10MC通過DVPCOPM-SL模塊與CANopen網絡相連時,DVPCOPM-SL模塊負責運動控制器與總線上其它從站的數據交換接口。DVPCOPM-SL模塊既可以在總線中做主站,也可以通過設置使其在總線中做從站。模塊映像地址:輸入:D6000-D6226,輸出D6250-D6476。
DVPCOPM-SL在設置地址時,只有在模塊斷電情況下設置才有效,完成設置后,再將模塊上電。如果接線與節點地址均設置正確,模塊上面的LED會顯示當前站號地址,如果為紅色代碼閃爍,請檢查通訊速率不要太高,或選用標準的CAN電纜。

圖8變頻總線圖
5.2伺服部分
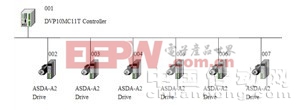
圖9伺服總線圖

pid控制器相關文章:pid控制器原理


評論