GPS/GSM智能車載終端的設計與實現


圖1系統(tǒng)結構框圖
·車載控制部分;
·車載外接部分。
兩部分之間通過電纜通信。
工作原理
車載單元接收GPS定位信號,并將車輛的位置和狀態(tài)信息傳送到監(jiān)控中心;同時,接收監(jiān)控中心的控制數據,并且對車輛進行控制。GSM網絡是車載單元和監(jiān)控中心進行信息交換的數據鏈路。其功能是:將GPS定位信息準確地傳回監(jiān)控中心;將監(jiān)控中心的控制數據傳給車載設備。
由車載GPS系統(tǒng)所確定的車輛位置信息通過車載通信單元將其發(fā)送給調度指揮中心,調度指揮中心便可及時掌握各車輛的具體位置,并可以直觀、清晰地顯示在電子地圖上。通過移動目標監(jiān)控調度系統(tǒng),調度指揮中心隨時可以知道入網移動目標的方位。不僅可以進行安全合理的監(jiān)控調度,而且可以為入網移動目標提供無線通信、遇險報警、決策指揮等多項服務。
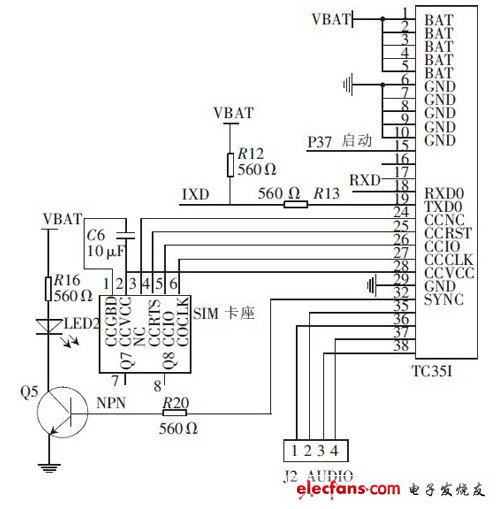
車載監(jiān)控終端包含有GPS定位模塊和GSM模塊,GPS模塊可根據管理指令將移動載體的當前位置、運行狀態(tài)等信息發(fā)往控制中心,并在控制中心的電子地圖上實時顯示出來。GPS模塊選用瑞士U—BLOX公司的TIM GPS接收器。TIM GPS接收機通過GPS天線接收衛(wèi)星信號,解算出車載移動終端的位置信息,一方面存儲于緩沖區(qū)中,作為日后路徑回放用,另一方面直接由單片機通過串口發(fā)送到GSM模塊。GSM模塊再通過GSM短消息方式把位置信息發(fā)送到監(jiān)控中心,監(jiān)控中心通過GIS軟件平臺就可以直觀、清晰地在電子地圖上發(fā)現車輛的軌跡,實現車輛的實時監(jiān)控。另外,車載終端也可以發(fā)送報警信息和語音信息到監(jiān)控中心;監(jiān)控中心也可以通過文字或語音的方式對車輛實施調度。
車載GPS智能終端硬件系統(tǒng)的設計
為使GPS/GSM車載通信系統(tǒng)智能終端具有較好的實用性及較高的性能/價格比,筆者對系統(tǒng)的硬件電路進行了精心設計。
主控單片機
采用模塊化的設計方法對系統(tǒng)的硬件進行了設計。整個控制電路以AT89C51單片機為核心,同時擴展其它相關模塊,實現各種復雜的操作,完成系統(tǒng)功能。
車載控制部分主控制部分的硬件電路圖如圖2所示。

圖2 主控制部分硬件電路圖












評論