PROFIBUS—DP現場總線在熄焦車控制系統中的應用

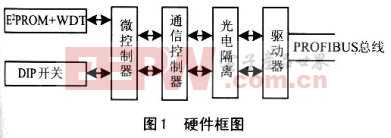
(2)ET200M分布式I/O從站
由于大量I,O設備分布在現場,且距主站較遠,直接連接非常不方便,系統配置了ET200M模塊來解決上述問題。安裝在現場的ET200M分布式I/O站最大限度地降低了信號傳輸電纜的數量,有效地簡化了現場布線復雜性。
3.3網絡介質
本系統現場總線網絡采用屏蔽雙絞線連接,抗干擾能力強且造價低廉。網絡的接口為基于雙絞線的ETARS485協議接口,通訊方式采用收發輪流進行的半雙工方式。其發送器和接收器均以差分方式工作,每個信號用兩根導線傳輸。無需公用信號,信號電平由兩根導線的差值表示,線問及外界干擾大大削弱,具有高的抗共模干擾能力,保證了網絡傳輸可靠。
4系統控制軟件
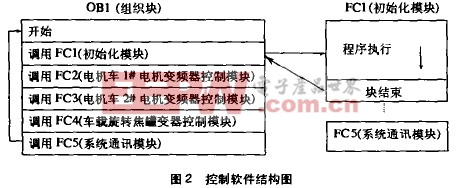
控制軟件結構如圖2所示。
4.1系統控制軟件的結構化編程方式
系統控制軟件的編制用SATICS7-30o語言完成,采用結構化編程方式編制。即將系統復雜的自動控制任務分解成為能夠反映系統工藝,功能的若干子任務,即分解為初始化任務,電機車1靜電機變頻器控制任務、電機車電機變頻器控制任務,車載旋轉焦罐變頻器控制任務、系統通訊任務,再分別對各子任務編制相應的控制程序模塊如圖2所示,最后創建組織塊OB1,形成模快化結構程序。
在程序運行時,PLC連續循環執行組織塊OB1,在OB1中調用相應的程序塊,在其下載到CPU后,PLC就循環掃描執行這些程序。
4.2系統自動定位停車控制算法
系統中的熄焦車和車載旋轉焦罐設備均有自動定位停車的控制要求。本課題組采用最優控制思想并結合系統各種約束條件設計出設備的優化運行模型。每一運行周期,PLC控制器依據優化運行模型計算出該次定位停車過程控制指令的期望值,并通過對設備運行過程中實際速度和距目標位距離等現場參數的分析,給出控制指令的修正值,控制器最終輸出到傳動系統的控制指令為Uo-Ur=△U。
該算法能有效提高定位精度,且簡單、適應性強。
4.3系統數據通訊
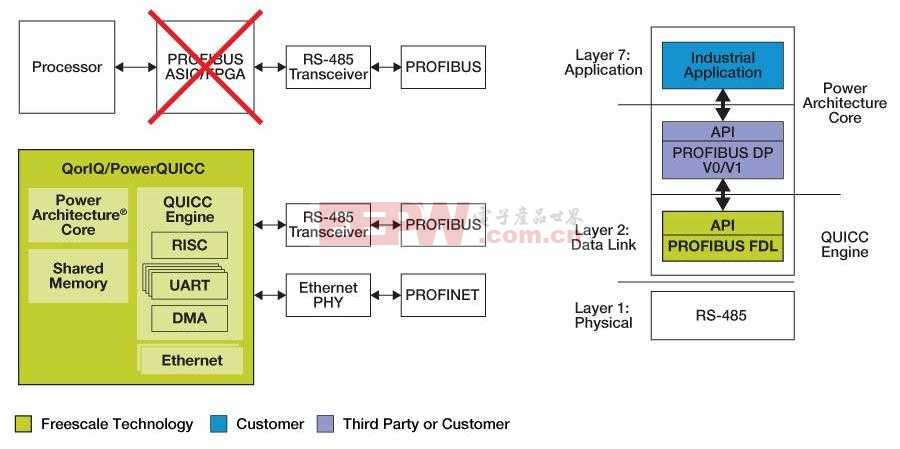
系統的現場設備與PLC之問通過PROFmUS-DP總線可以完成數據的讀寫和過程數據的傳輸,如控制字,狀態字,給定值和實際值等。
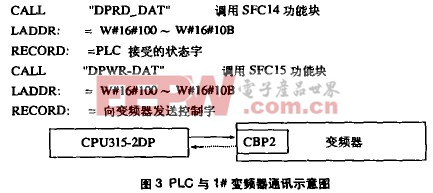
本系統主站核心模塊CPU315-2DP具有PR0FmUS-DP接口,無需另外的通訊接口單元。借助于CBP2通訊接口板,變頻器通過PR0FmUS-DP現場總線與SATICS7-30o可編程控制器連接。在編程軟件STEP7中完成硬件網絡組態,為變頻器分配網絡地址。該地址必須與變頻器CBP2板中設置的相同,在PLC程序組織塊OBI中選用SFC14“DPRD—DAT”,SFC15“DPWB_DAT”系統功能塊向變頻器的CBP2模塊讀取,發送數據。
以電機車1#變頻器為例,如圖3所示,其控制字單元FO地址從W靜1礎100(n)到W靜1礎10B(H),因此可進行12個字節的讀取,寫入調用系統功能塊SFC15,可把PLC應用程序“1#行走數據”塊中從DB11.DBX0.0開始的12個字節的內容寫入1#變頻器的控制存儲單元,包括初始化控制字,運行方向控制字、當前速度給定控制字、變頻器使能控制字等,控制變頻器運行。調用系統功能塊SFC14,可把1#變頻器的電機轉速實際值等狀態字讀入“1#行走數據”塊從DBII.DBX12.0開始的12個字節的單元中。
5結束語
本控制系統應用PROFmUS-DP總線技術實現分布式控制,使現場布線的復雜性有效簡化,不僅節省大量電纜及敷設費用,而且調試維護簡單方便,大大提高了系統的實用性、可靠性和開放性,充分體現了現場總線技術的優越性。系統目前已投入試運行,工程實踐證明,達到了預期的控制要求,控制精度高,運行穩定,抗干擾能力強。



評論