張力控制 收卷 放卷 PID調節

2.2 軟件設計流程
STM32芯片的軟件編寫,可以使用程序編寫軟件keil uvision4。keil uvision4不僅對Cortex_M3內核有很好的支持,而且配置和使用也較為方便,同時還包含有STM32的固件庫函數。張力控制的軟件是整個控制過程的靈魂,在合理的硬件電路上,它主宰著所有的控制流程。當芯片上電工作時,我們必須把系統時鐘和一些需要用到的外設進行初始化。然后利用時間片輪轉的方式實時地控制輸入、輸出和顯示模塊。
系統初始化是為芯片可以正常的工作做準備。這里首先要初始化系統的時鐘,把工作頻率由8 M(外接8 M石英晶體)倍頻到72 M,然后初始化內部FLASH的讀寫權限,最后使能總線上用到外設的時鐘。使能外設定時器3,開啟PWM功能。
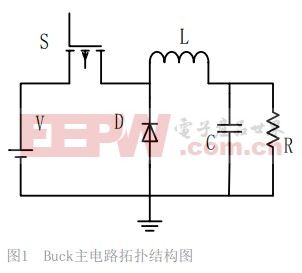
由圖1可知,控制器要處理兩個外部輸入信號,一是測量角速度,我們可以通過測量滾軸旋轉一周所花的時間得到。這里使能了外部中斷和定時器2中斷,當滾軸轉動時,軸上面的齒會使角速度測量器反饋給控制器一個上升沿,在下一個上升沿來時,我們可以利用定時器2得到兩次上升沿經過的時間,從而計算出滾軸的角速度。在給定了滾軸的直徑后,可以進一步推算出滾軸的線速度;二是測量張力,正確利用STM32控制器的外設ADC,首先要把硬件對應接入的GPIO引腳配置成模擬輸入模式。配置好ADC和DMA的工作模式,利用DMA功能把轉變成的數字量搬到固定的寄存器里,方便之后的數學運算。
在完成輸入信號的讀取后,控制器要對張力采樣的信號進行數字濾波,然后與用戶設定的張力值作比較,通過PID調節,控制輸出PWM波。利用定時器2采集到的時間量結合用戶設定的滾軸直徑和材料厚度等參數可以推算出材料的長度。當收卷筒收到用戶需求時,如果開啟滿料報警,就可以提醒用戶更換卷筒了;同理,放卷時可以開啟少料報警。當測量的ADC數字量很小時,若開啟了零張力報警,可以提醒用戶工作異常。
程序在運行時,我們可以在FLASH里開辟一段存儲空間,把用戶設定好的參數保存在這里,每次開機時,就可以先從這段存儲空間讀取參數,這樣系統就不僅可以準確運行,而且減少了很多設置麻煩。然而系統在運行時,也有可能會突然停電,這時必須可以保存卷徑(收卷簡或放卷簡的直徑),下次開機時卷徑就不必從初始值計算。STM32帶有可編程電壓監測器,這里可以開啟電壓監測中斷功能,這樣就可以在掉電的瞬間利用片內空白FLASH儲存當前卷徑。下表1為張力控制過程中用戶需設定的部分參數。

從宏觀上,程序設置了3層頁面。最上一層是工作頁面,系統在正常運行時,處于該頁面;第二層是參數選擇頁面,用戶在這里選擇需要修改的參數;第三層就是參數修改頁面,用戶可利用編碼器修改參數的大小,編碼器旋轉的快慢對應著設定值變化的快慢,用戶也在這里對系統進行調零和定標。由于張力傳感器測量的是滾軸的重量和卷料的張力總和,而調零則是先測量滾軸的重量;定標則是利用已知重量的法碼掛在滾軸上得到的信號量,如此,就可以準確測量出卷料的張力。
3 張力控制過程
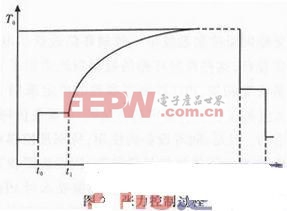
如圖2所示,張力的控制過程可以分為四個階段:預備階段,啟動階段,運行階段,停機階段。t0以前為預備階段,t0到t1為啟動階段,t1到t2為運行階段,t2到t3為停機階段,t3時間過后系統又重新進入了預備階段,而T0為用戶設定張力。用戶可以通過設置表中的參數完成控制過程,預備階段可以說是等待階段,用戶此時要把卷料準備好,而系統有一定的預備輸出預熱磁粉。在滿足啟動條件時,系統就進入了啟動階段,這里有兩種啟動方法,一是電平啟動,即用戶可以用開關開啟系統;二是速度啟動,即當滾軸速度達到一定值時,系統自行進入啟動階段,用戶按需求設定的啟動輸出使設備開始運轉。經過啟動時間,系統就進入運行階段,此時STM32控制器進行PID調節自動跟蹤,當所測張力調節到設定值時,輸出基本保持穩定狀態。當卷材收取或放出完畢后,若是電平啟動,則可以關閉開關停機系統,若是速度啟動,則當速度降為設定值時自動停機。停機時的停機增益是指運行階段輸出值的增加倍數。
除了以上自動張力控制外,還有另一個控制方法,即可以人為給定輸出值。人為給定輸出值是只在特殊情況下才會用到。然而做作為輸出的一種手段,也是必不可缺的功能。在張力控制過程中,也必須滿足在手動和自動的切換過程中,不會對輸出值有太大的變化,不然會至使卷料拉斷或松弛,造成巨大的損失。
4 結論
基于STM32閉環張力控制系統可以精確的控制張力,在印刷等輕工業中有著非常廣闊的前景。它不僅在信號的采集時有較高的精度,在控制過程中也有極強的穩定性和可靠性。在配置參數時也非常靈活,可以滿足多種用戶的需求。在精度要求高的張力控制系統中,值得推廣應用。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
隔離器相關文章:隔離器原理 電容式接近開關相關文章:電容式接近開關原理 接近開關相關文章:接近開關原理
評論