Elmo運動控制系統在飛機數字化裝配系統中的應用

本系統使用的CAN總線全面支持CANOpen 層面的DS301、DS305、DS401、DS402等協議,DS401、DS402這兩個協議為基于運動控制所開發的通訊協議,可以直接應用于運動控制場合;
由于以色列Elmo公司的產品全部采用的是CANOpen協議,其相關的通訊底層協議全部為開放式,方便客戶與自己的其他設備連接通訊;
CAN總線上可以掛接其他的設備, 例如現場總線I/O,但是所掛接設備必須支持CANOpen協議;
每個CAN總線理論上可以支持最多108個節點(Node),以色列Elmo公司目前的MAESTRO多軸控制器最多具有2路CAN總線,理論上最多支持216個節點,每個節點均可以掛接伺服電機或者CAN總線設備,故對于未來設備的擴展帶來了很多的方便之處。
MAESTRO的特點
以色列Elmo公司設計生產的MAESTRO為一種基于網絡的多軸運動控制器,可以完成2D、2.5D的差補,多個軸的同步以及開始、停止等類似 PLC的運動控制功能,同時其在整個系統的通訊層面可以完成的工作很豐富,諸如:網絡的網關;各個節點的狀態的監控;運動的網絡遠程訪問和控制;CAN現場總線的主站等。
一種基于MAESTRO的多軸運動控制系統可以簡單的用如圖3所示的框圖來表示:
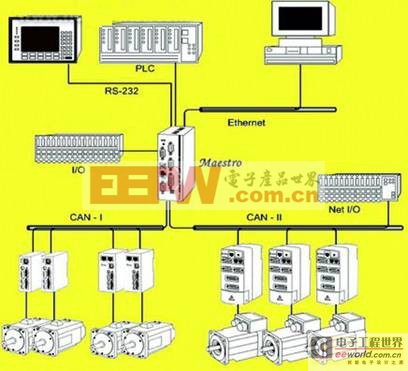
圖3 多軸運動控制器框圖
其中,需要明確幾個定義:
軸:每一臺驅動器與每一臺電機組成對,完成單個運動的控制,稱其為軸。
組:由多個軸組成,可以由MAESTRO發相同的同步指令到組里面的各個軸,其中每個獨立的軸均可以完成獨立的運動,同時要求構成組的每個軸的運動形式必須要一致。組可以定義多個。
矢量組:一般為由兩個獨立的軸組成的組,通過嚴格的控制時鐘同步來獲得精確的單軸運動定位,借此獲得期望的系統性能,同時矢量組可以完成2個軸的直線差補、圓弧差補以及螺旋差補等功能。同樣,矢量組也可以定義多個。

圖4 MAESTRO的基本構成
其中,按照功能不同,將其內部分為了五層,分別用不同的顏色表示,具體功能如下:
作為CAN現場總線主站的MAESTRO可以提供很多的網絡功能,其中包括了完成網絡配置;偵測并描述出CAN網絡中存在的CAN設備;通過使用標準的CANOpen協議完成CAN網絡信息的接收和發送;CAN網絡報警信息處理;根據其內部自帶的同步機制完成時鐘同步;通過使用CANOpen 的 DS301、DS305、DS401、DS402協議完成各個CAN設備之間的通訊等。同時,其作為同步運動控制器還可以實現以下一系列的同步功能: 發送同步運動指令到指定的運動單元軸;同步運動單元軸之間的啟動和停止等動作;通過其內部的callback功能實現對運動完成以及Elmo驅動器內部定義的觸發條件等的監控;以及發送通知到上位機等。
在與上位機通訊的過程中,MAE-STRO可以使用的通訊方式有TCP/IP以及RS-232。通過該通訊可以完成的功能包括:程序的上傳和下載;系統當前的狀態反饋;用戶程序運行情況的反饋;傳輸和解釋對MAESTRO的指令以及對任意一臺終端CAN設備的操作指令。用戶還可以通過使用 Elmo公司提供的Composer軟件通過這條通路完成對終端Elmo驅動器的直接操作和監控。
在運行用戶程序方面,MAESTRO也有其獨有的一些特點:其作為一個全面可編程的運動控制器可以實現并完成多軸運動的編程工作;可以運行一個或者多個用戶程序;用戶可以通過使用MAESTRO的編程語言來實現對其的編程操作,其編程語言與Elmo公司的驅動器的編程語言類似,都屬于類C的計算機語言,非常容易掌握;同時,其編程環境可以使用Elmo公司提供的Elmo Studio軟件來輕松實現。
基于以上的諸多特點,通過MAESTRO與Elmo智能型驅動器的配合使用,筆者便構成了一套分布式控制系統的基本框架,用戶可以根據自己的使用工藝要求和具體的工況來選擇合適的搭配和擴展,可靠穩定的完成預期功能。

圖5 內部功能示意圖
結語
目前,應用該套分布式控制系統的飛機柔性裝配系統已經通過了國家的驗收,準備投入批量生產。由于國內對于CAN總線的研究起步比較晚,在具體應用方面相對于國外也有很大的差距,對這方面的了解也并不是很全面,還處于摸索階段。但是通過該項目的成功應用,更加堅定了公司對這種分布式控制系統的推廣信心。我們將會加倍努力,將該套控制系統應用于諸如醫療、紡織、印刷等更多的行業和領域。


評論