計算機控制實驗內容設計及實驗裝置研制

3實驗裝置的研制
為了滿足自動化專業實驗教學內容的要求,研制了一套計算機控制技術實驗裝置。同時根據課程設計內容的需要,配套設計了一些典型控制對象,如自制直流機組、電烙鐵等。臺灣研華公司生產的研華原裝工業控制計算機IPC-610L是專門為工業控制系統而設計的,在工業電腦和自動化市場中應用非常廣泛。我系計算機控制技術課程選擇工業控制計算機作為教學機型,因此本實驗裝置研華原裝工業控制計算機進行開發。
3.1 研制的指導思想
(1)便于綜合性、設計性實驗的實現。設計性及綜合性實驗是提高學生創新能力的重要手段。計算機控制技術實驗裝置具有多功能性,輸入輸出接口功能較強,便于綜合性、設計性實驗的實現。
(2)便于開放式實驗教學。計算機控制技術實驗裝置采用積木式結構,操作方便,安全性好,便于開放式實驗教學的實行。
(3)實驗教學面向工程實際。注重貫徹實驗教學面向工程實際的思想。結合所設計的實驗教學內容,使學生明白工業控制計算機在自己畢業以后實際工作中的用途及使用方法,從而培養學生的工程興趣,提高實驗教學效果。在計算機控制技術實驗裝置研制之初,就制定了上述幾個指導思想,研制過程中,經過對樣機多次改進,最后用于學生實驗的實驗裝置,也基本上體現了這樣的指導思想。
3.2 裝置的基本功能
本實驗裝置由工業控制計算機、UNIT1~UNIT4掛箱及典型控制對象模型組成。工業控制計算機是實驗裝置的核心部件,在工業控制計算機中還有兩塊ISA接口的板卡PCL-812PG和PCL-833。PCL-812PG板卡是包含有A/D、D/A、DI、DO等功能的綜合板,插在ISA10插槽中;PCL-833板卡用來對光電編碼器的脈沖進行計數,插在ISA7插槽中。
UNIT1~UNIT4的每個掛箱只要拔掉后面的插頭即可方便地拆下,各掛箱之間可靈活組合、操作方便、直觀、用途廣泛。UNIT1面板包括電源控制、信號源和通道實驗三個部分。其中信號源部分包括噪聲源、階躍信號源和混合電路,噪聲源通過UNIT1掛箱內印制電路板上的撥碼開關切換輸出脈沖噪聲或均勻噪聲。階躍信號源可以通過手動調節電位器提供-10~10V的直流輸出,并可通過乒乓開關控制直流電源的通和斷提供階躍輸入信號。混合電路是兩路同相相加電路。通道實驗部分包括8路數字量輸入、8路數字量輸出、4路模擬量輸入和2路模擬量輸出。
UNIT2掛箱的主要功能是完成濾波實驗和數字PID算法實驗。包括模擬濾波電路、數字濾波電路和模擬對象電路三部分。模擬濾波電路圖如圖1所示。
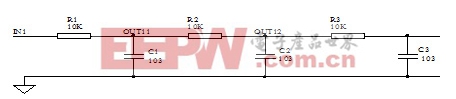
圖1模擬濾波電路圖
在UNIT2掛箱中的數字濾波電路只是一個示意圖,并無實際電路。在示意圖上標注說明濾波輸入經A/D通道1進入工業控制計算機,濾波輸出經D/A通道1從工業控制計算機輸出,并將2路通道與I/O接口電路相連。學生實驗時,只要按要求把混合信號插入指定的A/D通道端口即可觀察濾波效果。模擬對象電路主要有運算放大器和若干電容、電阻組成。學生做實驗時可通過UNIT2掛箱面板上的乒乓開關選擇一階或二階模擬對象。各模擬對象的電路原理圖如圖2所示。
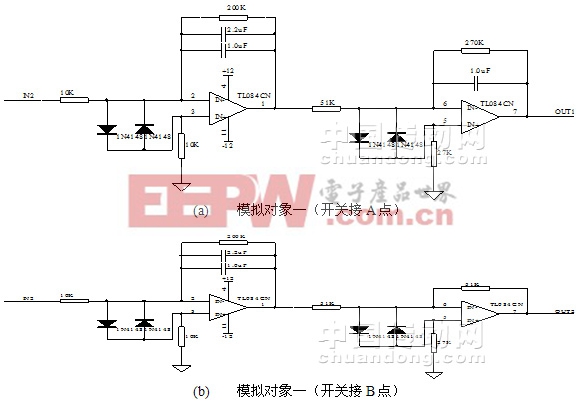
圖2模擬對象原理圖
與圖2對應的模擬對象傳遞函數為:
(a)(b)UNIT3主要用于完成電機位置控制和轉速控制實驗,附加集散控制系統實驗示意圖。電機控制原理圖如圖3所示。電機位置控制實質是構成一個位置環,輸入脈沖序列和反饋脈沖序列產生位置誤差脈沖序列信號,誤差脈沖序列信號加到驅動板上,以H型雙極可逆PWM方式驅動直流伺服電機低速高轉矩轉動,到達期望位置。圖3中的A/D和D/A均通過PCL-812PG板卡實現,脈沖板指插在工業控制計算機ISA10插槽中的PCL-833板卡。驅動板在UNIT3掛箱內部,它是H型雙極可逆PWM驅動系統。增量式光電編碼器每圈可輸出1024個A相和B相脈沖和1個零位脈沖,A、B相脈沖信號的相位差為90度。三個脈沖信號均為差分信號,輸入到PCL833脈沖板進行脈沖計數。學生實驗時可直接將給定信號連接到UNIT1掛箱面板上對應的A/D通道,工業控制計算機通過D/A通道輸出控制電壓,當控制電壓為-10~10V時,驅動板所輸出的電樞電壓能讓自制的直流電機組的轉速在-1500~1500轉/分內變化。這樣的設計主要是考慮到學生畢竟是在做計算機控制技術實驗,應將訓練的重點放在控制算法的掌握上,盡量減少學生在其它設計和調試中所花的時間。同時,將實驗裝置的電路原理圖附在實驗指導書的后面,供學生學習參考用。
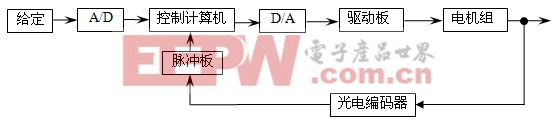
圖3電機控制原理圖
集散控制系統實驗在UNIT3掛箱內并無實際電路。集散控制系統采用工業以太網卡和TCP/IP協議構成的現場總線,現場總線將上位機和下位機連接起來,組成集散控制系統。下位機的數據傳輸線通過集線器與上位機交換數據。實驗軟件分為兩部分:上位機上有集散控制系統的監控界面,在Windows2000下的組態王6.5軟件中運行;下位機是現場數據采集界面,也運行于組態王6.5環境下。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
低通濾波器相關文章:低通濾波器原理
數字濾波器相關文章:數字濾波器原理

評論