汽車電子制動系統的研究初探

(3)裝用電機控制的執行器,要求高性價比的半導體具有較好的高溫性能,以承受在制動執行器附近產生的高溫。另外,需要開發輕的低價位的車輛制動器,而且由于輪轂尺寸的限制,尺寸要滿足設計要求。
(4)抗干擾處理。車輛在運行過程中會有各種干擾信號,如何消除這些干擾信號造成的影響,控制系統的軟件和硬件如何實現部件化以適應不同種類的車型需要,如何實現底瘟的部件化,是一個重要的難題。只有將制動、轉向、懸架、導航等系統綜合考慮,從算法上部件化,建立數據總線系統,才能以最低的成本獲得最好的控制系統。
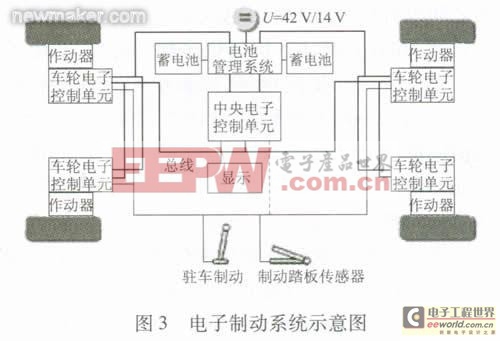
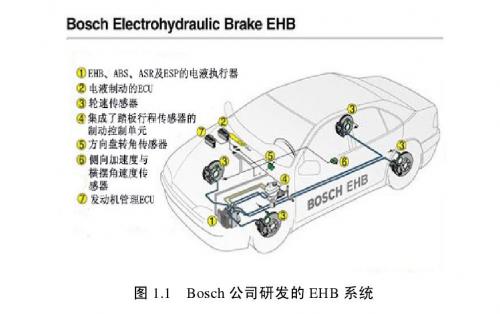
隨著技術的進步,上述各種問題會逐步得到解決,電子制動控制系統會真正代替傳統的以液壓為主的制動控制系統,其示意圖見圖3。
5 電子制動系統原理樣機的模塊化設計
(1)車輪制動模塊
車輪制動模塊由制動執行器、制動執行器ECU等組成。整車共4個車輪制動模塊,其結構如圖4所示。該執行器采用了電機內置結構,其最大特點是模塊化,整個機構分為3個獨立模塊:驅動電機、行星齒輪減速部分、把螺旋運動變成絲杠直線運動的行星滾子螺旋傳動部分。
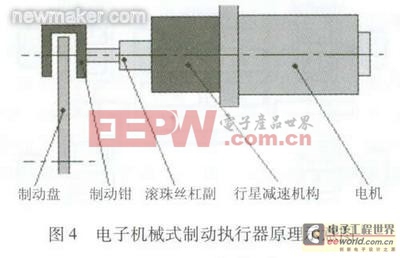
減速機構的選擇:行星齒輪減速機構。降低電機轉速,增大輸出扭矩,并有一定的軸向承載能力。
滾珠絲杠副:把電機輸出的旋轉運動變成絲杠的直線運動,對制動鉗施加壓力,產生制動力。
制動器:盤式和鼓式制動器。
傳感器:輪速、壓力和角位移傳感器。
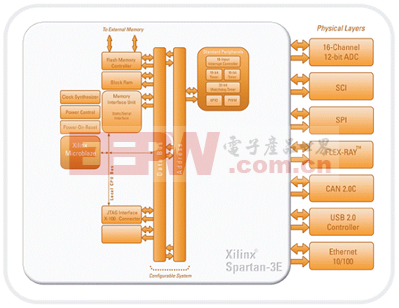
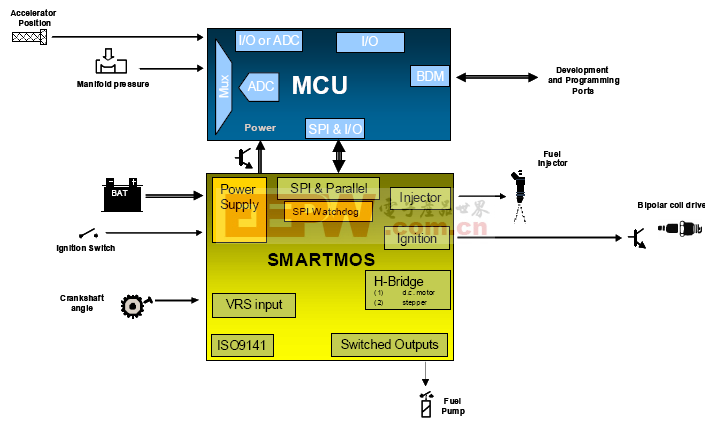
(2)中央電子控制單元
作為電子制動系統的核心,ECU要接受制動踏板發出的信號,控制制動器制動;接受駐車制動信號,控制駐車制動;接受車輪傳感器信號,識別車輪是否抱死、打滑等,控制車輪制動力,實現防抱死和驅動防滑。由于未來車輛中各種控制系統,如衛星定位、導航、自動變速、無級轉向、懸架系統等的控制系統與制動控制系統高度集成,所以ECU還得兼顧這些系統的控制。
(3)電子踏板模塊
它帶有踏板感覺模擬器和用以感知駕駛意愿的傳感器。電子制動系統取消了傳統液(氣)壓制動系統中機械式傳力機構和真空助力器,取而代之的是踏板模擬器。它將作用在踏板上的力和速度轉化為電信號,送給中央ECU。踏板模擬器的輸入輸出特性曲線要符合人們的駕駛習慣,并根據人體工程學設計以提高舒適性和安全性。
6 展望
隨著其它汽車電子技術特別是超大規模集成電路的發展,電子元件的成本不斷下降。汽車電子制動控制系統將與其它汽車電子系統如電子懸架、電子轉向、電子導航、無人駕駛系統等融合在一起成為綜合的汽車電子控制系統,未來汽車中不 存在孤立的制動控制系統,各種控制單元集中在一個ECU中,并將逐漸代替常規的控制系統,全面實現車輛控制的智能化。預計,到2010年40%歐洲生產的汽車將采用X-by-Wire技術。隨著X—by-Wire的發展,Brake-by-Wire、Thrust-by-Wire、Steer-by-Wire、Shift-by- Wire等by-Wire系統將成為X-by-Wire系統的各個子系統,它們之間會有一些數據共享,將有一個更大的通訊系統來實現之間的通訊,從而使整個汽車成為一個完全的X-by—Wire系統。不過,汽車電子制動系統的發展受到整個汽車工業發展的制約,只有巨大的現有及潛在的汽車市場吸引,各種先進的汽車電子、信息以及各種智能技術才能不斷應用到汽車制動控制系統中,同時也需要國際及國內相關法規健全,電子制動系統才會真正批量應用到汽車中。(end)





評論