卷板機數控系統的硬件和軟件設計

系統設計與開發采用了面向對象的方法因為這種方法模擬了人類認知客觀世界的過程;具有封裝性,集成性,以及消息驅動等一系列特性,使得改造的系統模塊清晰、組裝維護方便,可擴充性可重組性強;面向對象模型將概念模型、邏輯模型和物理模型統一到一起,極大的降低了系統的理解難度。
采用PMAC可編程多軸控制器,因為它的開發界面非常友好。它提供的PWIN 編程工具完全在Windows 環境,運行編輯修改非常容易。
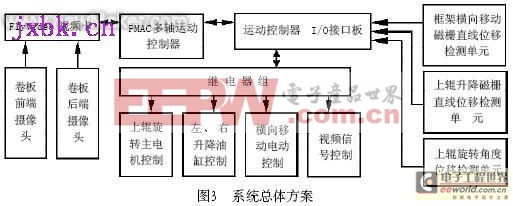
遵照面向對象的系統設計與分析的主導思想,系統設計成若干個對象模塊的有機組合。宏觀上看系統分為系統層、應用層和物理層三個層面,如圖4所示。主要解決IPC 與PMAC,FlyVideo繼承的一系列技術問題,因為PMAC 有自己的CPU 和RAM 還有EPROM; FlyVido 也有自己的RAM和相應的運算器,而PMAC和FlyVideo都是以總線方式與IPC相連,IPC要將這些資源和自身資源集成到一起形成完整的控制系統,必須有有效的集成手段。應用層是系統的主體部分,由若干個功能模塊組成。在系統層的支持下,各功能模塊獨立完成一部分任務,從而實現系統的所有控制目標。物理層是與物理空間相對應的機制,由若干和存儲文件結構對應的數據結構組成,用來滿足人機交互和訪問數據庫的需求。

軟件設計過程中還必須實現下面這些技術要求:
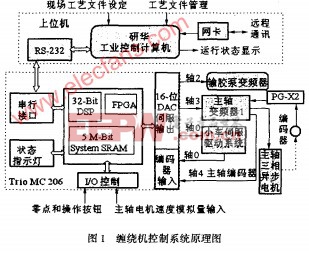
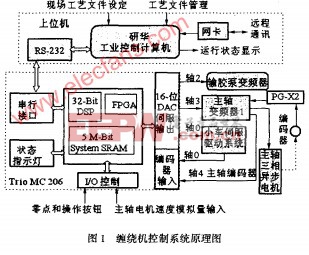
(1) 上位機與下位機的實時通訊:上位機與下位機的實時通訊是利用DELTA TAU DATASYSTEM 公司提供的與PMAC相配套的PtalkDT類實現的。PtalkDT類通過添加ActiveX 的方式加以實例化,并由其中的GetResponse()方法完成雙向通訊。上位機與下位機通訊的速度取決于主計算機的主頻、PMAC CPU 的速度,以及系統程序和下位機控制程序的大小。
(2) 視頻顯示:視頻信號的處理及圖像顯示控制是通過對視頻卡的二次開發實現的。FlyVideo視頻卡提供了OCX標準控件Capwnd與應用系統進行集成。該控件的16 個主要方法和7 個屬性由MFC42.DLL 和MSVCRT.DLL兩個動態連接庫支持,借助這兩個動態連接庫支持,系統開發了Overlay 和Peview 兩種圖像顯示模式,以方便現場的不同要求。
(3) 穩壓電源:大型卷板設備工作環境惡劣,尤其是電網電壓極不穩定,很容易沖擊數控系統,造成死機。其結果輕則產品作廢,重則損壞設備,損失難以估量。為了防止數控系統因電源干擾而產生控制失誤,系統專門配置了響應速度小于0.1ms 的在線不間斷穩壓電源。除此之外,系統還在軟件設計上進行了必要的處理,為每個動作編制了濾波程序。
(4) 控制時鐘:系統控制時鐘主要是從保證系統正常運行的角度,周期掃描下位機I/O 口、視頻信號狀態,以及中斷請求信息,實現上位機與下位機的實時通訊;獲取運動坐標當前值;動態管理數據庫;在線決策程序進程等。此模塊由標準控件Timer 實現。為了提高可靠性,系統采用單時鐘驅動時鐘,掃描周期80ms。
3 結論
經過生產實踐的檢驗,17000kNx3000mm上輥萬能式卷板機數控系統的軟件和硬件設計完全符合生產。在生產過程中,系統控制軟件配合硬件順利地進行數據輸入、數據處理、信息輸出以及對執行部件的控制,使數控卷板機按照設計要求,安全可靠地運行自動卷制工藝過程。
參考文獻
[1] 李佳.大型卷板設備數控系統設計 [J].重型機,2001,6.
[2] 李志堅.并聯機床開放式數控系統 [J].機械工程,2001(3).
[3] Solving some discrepancy problems in NC [J].Algorithmica,2001(3).

評論