步進電機控制系統的設計方案

現以三相反應式步進電機來分析兩種細分方式。
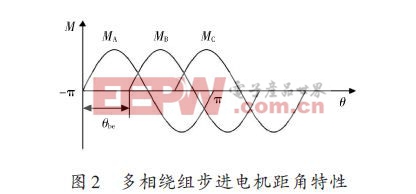
三相反應式步進電機三相繞組分別通電時,其矩角特性為彼此相差120°電角度的正弦曲線,如圖2所示。
當A、B兩相通電時,設電流分別為iA、iB,相應的靜轉矩為MA、MB,忽略磁路之間的影響,其合成矩角特性為二者相疊加,如式(3)所示:
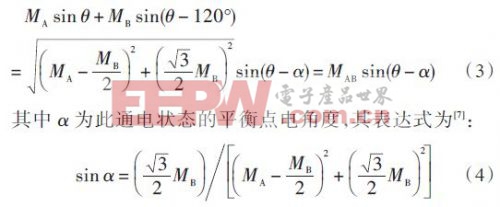
由公式(3)和(4)可知,當步進電機的電流按照線性規律變化時,其距特性如圖3(a)所示。由于距角特征幅值因通電電流的不同而各不相等,因此各細分步的步距角就不能保持一致。理想的細分電流波形應使各通電狀態下的步距角特性的幅值、形狀均相等,如圖3(b)所示。
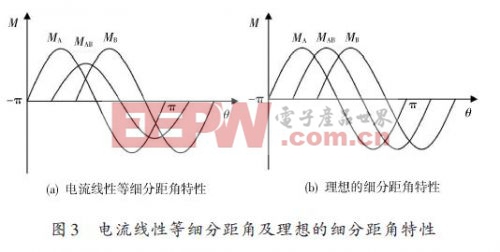
因此電流按線性規律變化的細分方式使得細分后的每一小步的控制精度不相等。而如果按等步距角細分,則細分后的步距角為:

陀螺儀相關文章:陀螺儀原理









評論