步進電機控制系統(tǒng)的設(shè)計方案

0 引言
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,輸入脈沖總數(shù)控制步進電機的總旋轉(zhuǎn)角度,電機的速度由每秒輸入脈沖數(shù)目所決定,因此易實現(xiàn)機械位置的精準(zhǔn)控制。而且由于步進電機價格低廉、可控性強等特點,使其在數(shù)控機床傳送控制等自動控制領(lǐng)域中得到了廣泛的應(yīng)用。但隨著技術(shù)的發(fā)展以及企業(yè)生產(chǎn)的要求,步進電機傳統(tǒng)的以單片機等微處理器為核心單元的控制系統(tǒng)暴露出了如下缺點:控制策略單一不利于實現(xiàn)人機交互,而且控制電路復(fù)雜、控制精度低、生產(chǎn)成本高,系統(tǒng)穩(wěn)定性不夠,步進分辨率低、缺乏靈活性,低頻時的振蕩和噪聲大,而且受步進電機機械結(jié)構(gòu)和空間的限制,步進電機的步距角不可能無限的小,難以滿足高精度開環(huán)控制的需求。由于FPGA編程方式簡單,開發(fā)周期短,可靠性高,使其在工業(yè)控制領(lǐng)域的應(yīng)用越來越廣泛。本文在總結(jié)FPGA的分頻技術(shù)以及步進電機細分控制原理的基礎(chǔ)上,通過PWM控制技術(shù)來提高步進電機的分辨率,仿真和實驗表明,本文采取的措施有效地實現(xiàn)步進電機控制的高效、精確控制。
1 步進電機細分控制原理
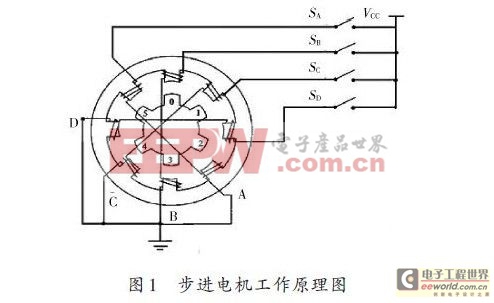
步進電機的工作原理如圖1所示,對四相步進電機而言,按照一定的順序?qū)Ω飨嗬@組通電即可控制電機的轉(zhuǎn)動。例如,當(dāng)開關(guān)B與電源導(dǎo)通而其他開關(guān)斷開時,在磁力線的作用下B相磁極和轉(zhuǎn)子0,3號對齊;當(dāng)開關(guān)C與電源導(dǎo)通而其他開關(guān)斷開時,在磁力線的作用下,轉(zhuǎn)子轉(zhuǎn)動,1,4號齒和C相繞組的磁極對齊。同理,依次向A,B,C,D四相繞組供電,電機就會沿著A,B,C,D方向轉(zhuǎn)動。
為了理解步進電機的不足,還需了解步進電機的步距角。步距角的定義為:

式中:km為步進電機的工作節(jié)拍系數(shù);zn為齒數(shù)。
受步進電機的拍數(shù)和轉(zhuǎn)子齒數(shù)的限制,步進電機的步距角不可能非常小,即每一單步控制的轉(zhuǎn)動量相對比較大,在許多精密控制領(lǐng)域,步進電機的功能達不到使用要求。因此為了提高步進電機的分辨率,需采用細分控制技術(shù)對其進行優(yōu)化控制。細分控制類似于插值,其基本原理就是將電機繞組中的電流細分,在兩個控制電流之間增加許多中間狀態(tài)的電流,使得步進電機可以工作在許多中間的狀態(tài),從而使得步進電機的每一步得到細分,其步距角更小,系統(tǒng)的分辨得到提高,性能得到優(yōu)化。而細分控制通常有兩種細分方式,一是使電流按線性規(guī)律變化來細分,二是按等步距角細分。為了比較兩種細分方式的優(yōu)劣,還需要了解步進電機工作時的靜態(tài)距角特征。

式中:M 為電磁轉(zhuǎn)矩;Mk 為一定繞組電流時的最大靜轉(zhuǎn)矩;對于反應(yīng)式步進電機,當(dāng)不考慮磁路飽和時,可以認為Mk 與電流i 的平方成正比,負號表示電磁轉(zhuǎn)矩與定子磁場之間為楞次關(guān)系,即電磁轉(zhuǎn)矩總是阻礙轉(zhuǎn)子離開磁場最小磁阻的位置。

陀螺儀相關(guān)文章:陀螺儀原理









評論