基于PLC的串級調速系統在全速狀態下的故障處理

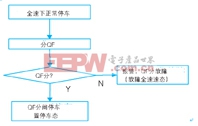
圖4 全速正常轉停車過程中故障處理流程
如圖5中信號1為電容電壓,信號2為4km返回。在進行保護時,4km分快于2km合。從圖中可以看出,當某一時刻qf跳閘時,電容電壓十分迅速的從70v降至0v。而接觸器4km在qf跳閘后經過55ms左右后由閉合狀態轉換到斷開狀態。

圖5 qf跳閘故障波形圖
4.2 全速態下緊急停車過程中故障處理邏輯控制程序
串級調速控制系統在全速狀態下在某些特殊的情況下需要緊急停車。如圖6 所示,在這種情況下,plc發出斷開高壓開關qf的命令。如果在一定時間內qf狀態的返回信號沒有送到plc的輸入端,則plc會發出使得接觸器4km斷開的命令;如果這個qf斷開信號送到了plc的輸入端,這個系統在全速狀態下緊急停車過程結束,發送命令使得停車狀態指示燈亮起來。
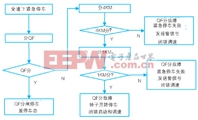
圖6 全速下緊急停車過程故障處理流程
而plc發出斷開接觸器4km的信號,可以從圖3的基于plc的內所饋串級調速系統原理圖中得知,這相當于是把整流、斬波和逆變這三部分從系統中切除。讓系統在全速、轉子繞組開路或者轉子繞組串水阻的方式運行。如果經過一定時間接觸器4km的斷開信號沒有返回到plc的輸入端,則plc會認為接觸器4km也發生故障不能正常操作,在發報警信號的同時,閉鎖系統進入調速狀態的權限。
當接觸器4km的斷開信號送到plc的輸入端后,plc發斷開接觸器1km的命令,既然高壓開關都不能斷開,但要想使電機停下來,也只有讓電機處在轉子繞組開路的狀態。當接觸器1km在一段時間內沒有把斷開信號返回到plc的輸入端,系統也只能保持全速的工作狀態,發出報警信號的同時,閉鎖系統進入調速狀態的權限。如果這個斷開信號送到了plc的輸入端,則電機按最壞的處境,保持在轉子開路的狀態下,當然這種情況下,電機是無奈的停止轉動。plc在發出報警信號的同時,閉鎖系統進入啟動和調速狀態的權限。
如圖7所示 為逆變停止后停車的電壓波形圖。圖中信號1為電容電壓,信號2為4km返回。正常全速或故障轉全速時,電容儲能不為零,額定電壓約70v,全速時電容電壓約40v。

圖7 全速停車過程波形圖
5 結束語
本文充分考慮了內反饋串級調速系統的原理,采用西門子公司的plc組成串調的控制系統,充分利用了plc控制系統的全數字化,簡單可靠,體積小,控制更加準確,搞干擾能力強等優點,并且通過流程圖全面分析了電機在全速狀態下可能出現的幾種故障,通過仿真波形可以看出在plc控制系統中,當全速狀態下某種異常情況發生時,控制系統都能夠及時準確的采取相關的保護措施,由于全速狀態是電機工作的一個重要狀態,如果全速狀態下的故障發生率能夠得到有效的控制,那么對于維護整個調速系統的穩定性將是至關重要的。

西門子plc相關文章:西門子plc視頻教程






評論