電力傳動及電池管理系統驗證

目前,許多不同的交通工具平臺都采用了混合動力及電力傳動(e-drive)控制系統,比如飛機、乘用車及商用車。這些系統需要采用電池管理系統(BMS)及其他一些系統,來處理系統在電力方面的需求。
不過,這些技術的發展增加了系統的復雜性,在平臺多樣性方面表現得比較明顯,而在不同電子控制單元(ECU)的控制算法方面尤甚。
系統復雜性的不斷增加為軟件設計及ECU系統的驗證帶來了新的挑戰,這就要求仿真工具不僅可以處理這種復雜性,還能夠提供具有成本效益且得到行業認可的驗證方法和流程。
這些仿真及測試工具及流程需要能夠在整個設計過程的不同階段為基于模型的設計(MBD)提供足夠的支持,從控制概念仿真到最終目標系統的確定。采用模型在環(MIL)、軟件在環(SIL)及硬件在環(HIL)方式的MBD設計流程要能夠利用整個流程中采用的各種工具帶來的協同效應。
硬件在環仿真常常用于電力傳動及電池管理控制系統的驗證。該驗證流程涉及具體的模型處理及實時接口的實施技巧,此外還有關鍵的功率接口及電氣硬件功能性。
電力驅動系統及混合動力系統有強制性的先進控制方式,將其與現代動力總成技術及領先的能量存儲系統結合起來。
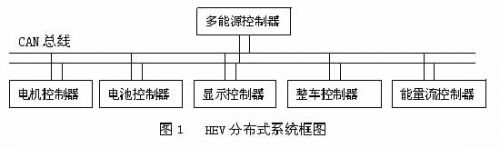
這些系統也傾向于采用分布式ECU,而這更進一步增加了集成測試及開發的復雜性。
不過,電力傳動系統ECU測試需要具體的硬件,視測試接口而定。電池管理系統也需要具體的硬件和建模方式,主要視能量控制ECU內部的零件分布而定。
電力傳動系統采用電機速度及電流來形成環路,因此這些接口和功率負荷的詳細參數必須考慮在內。電力傳動應用中的這些控制環路需要高速實時的動態響應,這就需要采用更高仿真度的模型,而且具備穩定的控制動態效應,可以形成封閉環路。信號測量所需的時間分辨率在低于微妙的范圍內,而且這些測量必須適用于電力電子模型——在該模型中,交換延時和死區時間現象可以得到有效解決。
此外,不同的應用,比如無傳感器BLDC電機就需要針對反電勢仿真采用針對性的接口,以確保適當的測試功能。
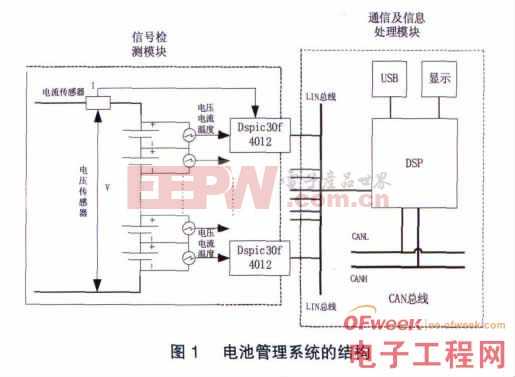
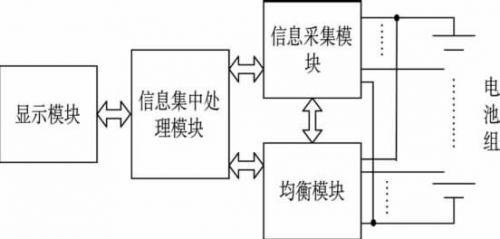
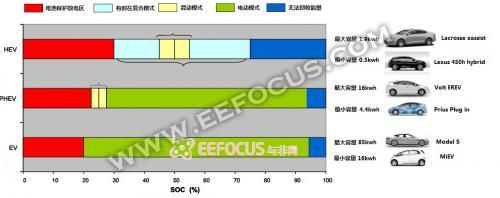
電池單元仿真測試是驗證不同電池單元間或電池堆子系統間平衡性控制策略的關鍵。不同的電池類型也在這些電池管理系統的監控范圍內(鋰離子、鎳氫、鉛酸等),因此模型在建立的時候需要將這些特性考慮進去。對多個電池單元在維持同步更新頻率的情況下實現實時仿真,加上還要對相關溫度傳感器的仿真,這之中有很多的限制。
電池單元一般采用串聯的方式連接在一起,因此許多電池單元或電池子系統都具有較高的地電位,需要采用合適的絕緣方式來解決。這種電池單元仿真的最主要要求是較高的電壓解析度準確度(mV范圍),且電壓漂移低。
要實現電機的仿真,模型須能夠在合適的精度下實時運行,這樣可以在信號級及功率級方式下進行測試,具體采用哪種方式則視需要被測試系統的類型來定。這種類型的仿真及測試有多種選擇,主要依據電機及電力電子的特性來確定。
在電池管理系統ECU的測試中,需要采用高精度硬件進行電池單元的仿真,此外還需要具備所需的功能性,這樣才能對電池的平衡機制進行測試,同時提供合適的高壓及ECU通信接口。這些系統的實時計算也具有非常嚴苛的要求,無論是高速電機負荷仿真還是具有多電池單元的電池堆仿真。這就需要采用經過驗證的系統,可以確保計算機接口的功能性。
此外,這些系統的安全要求也非常重要,尤其考慮到高壓及高電流很可能會出現在逆變器電機接口及電池堆內的情況。
還有一些應用可能需要采用特殊的測試硬件接口及實時模型控制,這樣才能夠對系統性能或監控管理狀況進行充分的驗證。
汽車、航空及商用車領域的需求比較嚴苛,也是促使這些接口創建的推動力,因為對安全的考慮及對昂貴硬件的潛在破壞性也使得在任何真正硬件集成前首先進行功能性測試成為必不可少的一步。
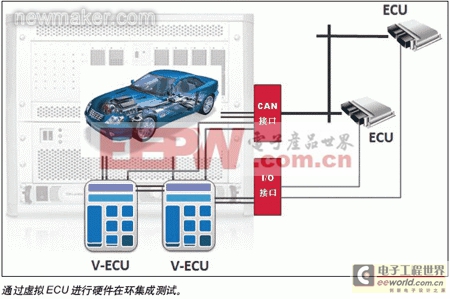
這些系統測試還可以通過幾種方式利用虛擬ECU測試的做法。
電機控制器及電池管理系統單元的核心軟件可以采用模型在環及軟件在環的方式進行測試,通過這種方式制定的測試方案也可以用于硬件在環環境中。這些控制系統還可以采用多個控制器,還可以在硬件在環環境中缺少相應硬件的情況下對這些系統展開測試,在這種情況下,缺失的ECU的核心軟件以虛擬ECU的方式運行。
這些特性和功能的實現提出了一個要求,即需要在工具、虛擬ECU和硬件在環環境之間需要形成一種標準的互操作性。 隔離器相關文章:隔離器原理


評論