基于直線電機控制轉向力的汽車轉向系統探討

用直線步進電機控制轉向助力的汽車轉向系統
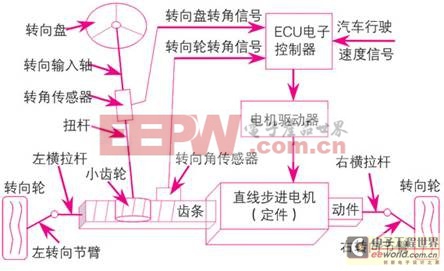
圖2 用直線步進電機控制轉向助力的汽車轉向系統結構原理
如圖2所示,其直線步進電機的動件直接與轉向器齒條相連,整個直線步進電機套裝在轉向器齒條機構上,幾乎不占用空間。它也是在原先結構最簡單的無助力機械轉向系中增加一臺直線步進電機,由直線步進電機的直線推力來直接助力駕駛員對轉向器的操縱力矩,由于對轉向器的助力并不很大,齒條的直線位移量也不長,用一臺小型直線步進電機足以驅動。其控制原理與eps基本類同,只不過對電機的驅動需改用前述步進電機脈沖分配方式。具體實施可參照有關eps[1]中的電子控制器ecu與其控制邏輯等進行,并借用eps中相關傳感器。即根據轉向盤轉角信號控制直線步進電動機位移量,利用轉向輪轉角信號來實現閉環控制,精確控制其位移量,根據車速進行相應的助力。在低速時給予較大助力,隨車速提高而減小助力,車速高到一定范圍時停止助力,而在汽車高速行駛時又希望能對轉向系統有一種“反向”助力,即適當增加轉向系的阻尼。這一點對于現有的轉向系較難做到,而采用直線步進電機助力就很容易實現,根據直線步進電機工作原理可知,只要保持其電機的通電狀態即可使該直線位移裝置具有一定自鎖力,控制其通電電流大小即可改變定、動件之間的磁拉力大小。從而可按車速信號根據要求來控制其轉向助力的大小,隨著車速的提高即減小繞組通電電流,其轉向助力也隨之減小;當車速高于相應速度(一般為30km/h)時就取消給轉向系助力,即停止給直線步進電機供電;而當車速高到一定程度時,希望能給轉向系逐漸增加其阻尼,可使直線步進電機繞組保持通電狀態而產生自鎖力,控制其電流大小即能改變對轉向系的阻尼大小。達到對轉向盤的操縱即輕便靈敏又穩定可靠。
用直線步進電機控制轉向力的汽車轉向系統
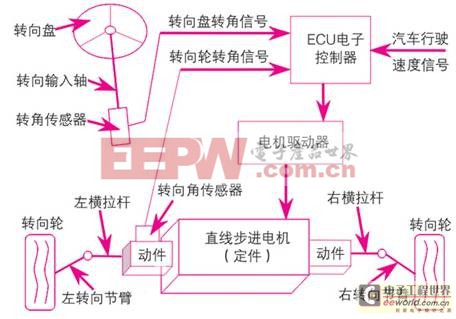
圖3 用直線步進電機控制轉向力的汽車轉向系統結構原理
如圖3所示,它進一步簡化了轉向系的結構,去掉轉向盤至橫拉桿中間的所有傳動鏈,包括齒輪輸入軸扭桿及齒輪齒條付。轉向盤內安裝有轉向盤轉角傳感器,并適當增加其轉動阻尼,獨立安置于駕駛室內。而直線步進電機的動件兩端直接與左右橫拉桿相連,電子控制器根據轉向盤的轉向角度信號及車速信號,來控制直線步進電機動件進行左右位移,經橫拉桿、轉向節臂傳動,進而控制車輪轉向。在確保系統可靠性的前提下,該方案的優點是結構更簡單、所占體積更小、成本低、控制更直接、響應更快。但一旦系統發生故障,汽車就無法轉向。而用在四輪轉向4ws系統的后輪轉向機構中卻是優選的方案。它的應用有望使汽車四輪轉向4ws系統的性價比進一步得以提高。
結語
文中闡述了為提高汽車轉向系統的快速響應性和滿足在不同車速下有相應的助力等功能要求,在對汽車轉向系統各功能要求與其相應機構運行原理的分析基礎上,根據轉向機構最終帶動轉向節臂的橫拉桿均為左右直線運動等特點,提出了用直線步進電機直接帶動左右橫拉桿的兩種汽車轉向系統控制機構。此設計方案可使控制更直接,動態響應更快,又省去了大部分機械或液壓部件,使結構更簡捷,且利用直線步進電機的控制特點,即可方便地充分滿足轉向力隨車速變化的各控制要求,又提高了轉向精度。該設計方案的實施還有助于提高高性能汽車四輪轉向系統的性價比。
作者簡介
王貴明(1950-) 男 高級工程師,研究方向:數控伺服技術,電動汽車、智能交通等相關技術及機電一體化。
參考文獻
[1] 王貴明,王金懿.電動汽車及其性能優化[m].北京:機械工業出版社,2010.
[2] 王貴明,王金懿.電動汽車用四輪轂電機驅動實現四輪轉向的電子差速轉向控制系統[p].中國:200910152933.1,2010.6.2.
[3] 王貴明.用恒溫直線電機驅動的位移控制裝置[p].中國:cn86107217,1987.6.10.
[4] 王貴明.直線電機進給系統特點及改進方案[j].制造技術與機床.1999.6.

電動機相關文章:電動機工作原理設計







評論