微創機器人從手結構的設計及運動學分析

近20年來,在微創外科及其市場需求的驅動下,將先進機器人技術、計算機技術、控制技術、遠程通訊技術、圖形圖像技術等有機結合起來的計算機輔助機器人微創手術系統得到了迅速的發展。與人類相比,機器人具有狀態穩定、定位準確、靈巧性好、工作范圍大、不怕輻射和病菌感染等優勢[1]。這將給2l世紀外科手術領域帶來一場新的技術革命。
微創外科手術是指外科醫生在病人身體上開四個孔(1cm),一個用于插入內窺鏡,另兩個用于插入細長的手術工具[2],剩下的一個孔用于輔助操作。該技術可以實現手術的最少損傷、減少手術并發癥、縮短手術后康復時間,降低醫療費用。因此,受到醫生和患者的普遍歡迎,是外科手術發展的必然趨勢,具有廣闊的應用前景。
由于受到工作空間的限制,微創手術難度大,時間長。現有微創手術機器人系統都是基于傳統“纏繞打結法[3,4]”進行縫合打結的。由于存在線圈從工具端部滑脫,張緊力不容易控制等問題,導致縫合線打結一次成功率低,手術時間長,縫合打結效果差。為了解決傳統“纏繞打結法”不適合機器人縫合打結的問題,本文提出一種新型的適合機器人縫合打結的“扭轉打結法”,基于該方法設計出新型的微創手術機器人系統。
扭轉打結法
“扭轉打結法”[5]既是通過夾持工具的旋轉使縫合線產生扭轉,同時扭轉可以轉化為絞擰,形成打結所需的圓環的打結方法。
用“扭轉打結法”進行縫合打結的一般步驟如圖1所示。

圖1 “扭轉打結”法打結過程
從圖1中可以看出,采用“扭轉打結法”在打結過程中,在縫合線兩端夾持點相互靠近時,縫合線由“扭轉”轉化為“絞擰”;而當兩夾持點相互遠離時,縫合線由“絞擰”轉化為“扭轉”。通過末端工具電機旋轉便能完成這個動作要求,且左右工具之間沒有相對的位置與姿態的變化,因此不受工作空間大小的影響,也不會因縫合線的張緊力而損傷血管。
機器人系統機構設計
“扭轉打結法”通過對縫合線施加端部扭矩實現縫合線形狀的改變,形成打結所需的線圈,其運動形式包括沿軸向的往復運動、繞軸向的旋轉運動和夾持工具的開合運動。為了防止誤操作造成對病人的傷害,應該實現基于機構的定點運動。系統原理圖如圖2所示。
該系統為雙臂機構,每個機械臂有5個自由度,分別為繞r軸、v軸、z軸的轉動,繞u軸曲線移動和沿v軸的手術器械的直線移動。其中,z軸和r軸的轉動為擺動,v軸的轉動為手術器械回轉。通過u軸和r軸實現基于機構的定點(切口)運動,通過v軸和z軸轉動實現末端工作裝置的姿態變化。

圖2 機械臂結構原理
各部分結構的設計
u軸曲線移動和r軸擺動結構的設計
微創手術是通過體表切口將手術器械伸入體內進行手術的,為防止誤操作造成對切口的損傷,系統應具備定點運動特性。在機構設計過程中,采用半圓弧軌道機構和軸直接驅動擺動機構實現系統的定點運動。
半圓弧軌道機構如圖3,為實現“定點”運動,只要確保患者的體表切口位于圓弧軌道的圓心處即可。這種結構簡單,容易實現,驅動機構可以選擇具有傳動準確、可靠、運轉平穩、承載能力大、體積小、效率高等優點的齒輪傳動。在圓弧軌道外側表面上加工成齒形結構,把動力源放置于軌道上面的滑塊上,小齒輪的運動帶動滑塊沿u軸曲線移動。
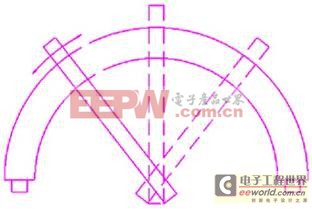
圖3 圓弧軌道機構
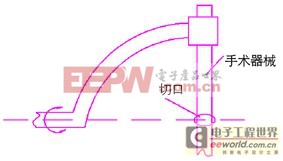
圖4 軸直接驅動擺動機構
軸直接驅動擺動如圖4,實現軸擺動的軸線過圓弧軌道的圓心即患者體表切口也可實現“定點”運動。

評論