微創機器人從手結構的設計及運動學分析

此機構的微型減速電機安置在滑塊上,安裝時要保證輸出軸線過圓弧軌道的圓心,其結構簡單,驅動方便。所以在實現繞r軸的轉動中選用這種機構。
v軸移動結構的設計
可以實現直線運動的機構主要有:螺旋機構、曲柄滑塊機構、有特定尺寸的四桿機構、鏈傳動和齒輪-齒條機構等幾種機構。
v軸移動要求手術器械做往復直線運動,結合各種機構運動特點,最后選用齒輪-齒條機構。
齒條的一端用微型圓錐滾動軸承連接在手術器械上,一端卡在套筒上,此機構手術器械便于拆裝。
v軸轉動和z軸擺動結構的設計
手術器械自身的回轉機構設計:為了減輕手術器械自身的質量,以及體積限制,盡量選用結構比較簡單的結構,并盡可能緊湊。v軸轉動選用微型減速電機直接帶動手術器械實現。微型減速電機安置在套筒上,再把套筒與齒條固連,如圖5所示。
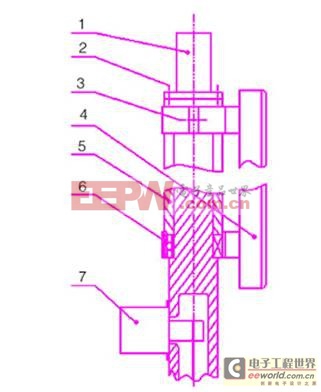
1—微型減速電機; 2、3—8xm1;4—齒條;
5—套筒;6—678zz軸承; 7—微型減速電機。
圖5 v軸轉動和z軸擺動
z軸擺動機構的設計:為了減少進入人體內手術器械的直徑,把腕部的擺動控制系統設置在切口外部,這樣使控制部分與腕部有一定的距離,可以采用絲傳動來實現z軸擺動。不僅可以增加從手的精度和剛度,還能使從手結構緊湊、自重輕、剛度高。
為了防止機構運動時引起末端工具的開合及其姿態的變化,絲傳動原理如圖6所示。
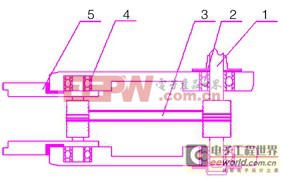
1—軸驅動軸;2、4—深溝球軸承;
3—鋼絲;5—末端工具。
圖6 走絲方法
運動學分析
運動學正解
按照d-h法嚴格建立桿件坐標系及各關節的參數,分別如圖7和如表1所示。
表1 微創縫合機器人的d-h參數

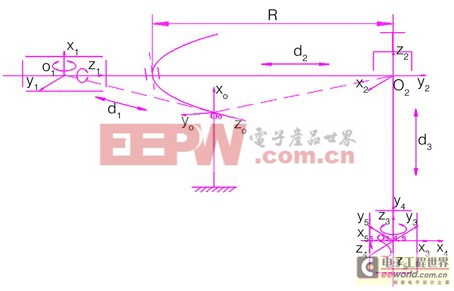
圖7 微創縫合機器人結構
然后根據各關節參數以及通過matlab進行矩陣計算,可求得各桿系的轉換矩陣以及機器人末端在基礎坐標系中的位姿矩陣,如公式1-6所示。

評論