基于易控組態軟件全虛擬PLC的實現及應用

完成梯形圖的編制后,啟動梯形圖邏輯測試工具(LLT) ,則梯形圖程序寫入虛擬PLC的CPU中,且虛擬PLC自動置RUN狀態。(3) INSPEC是一種面向工業自動化的通用數據采集和監控的組態軟件,它能夠實現對自動化過程和裝備的監視和控制。根據實際現場的需要,在易控組態軟件平臺上進行上位監控界面設計,依照易控組態軟件的應用要求繪制并連接各個畫面,建立基于易控組態軟件的監控界面。(4)MX Component是三菱一款用于PC與PLC進行通信的軟件,MX Component支持個人計算機與可編程控制器之間的所有通信路徑,兼容多種高級語言諸如VisualC++ 、Visual Basic 和Access Excel 的VBA、 VBScript等,在易控組態軟件中就是應用MX Component與GX Simulator進行通信的。打開MX Component軟件,在MXComponent設置界面上將PC side I/F項后的下拉目錄選擇為GX Simulator項、將CPU type項后的下拉目錄選擇為FX2N(C)項。這種基于易控組態軟件和應用MX Component與GXSimulator握手通信方法很簡潔。經過簡單設置后,可以通過MX Component運行界面上的Connection test項進行通道建立成功與否的檢測,當通道建立成功并進行檢測后可以看到虛擬通道連接成功的提示。
綜上所述,GX Simulator和易控組態軟件通過MX Component進行通信連接,建立基于易控組態軟件的監控界面和GX Simulator的對應信息交互,最終實現仿真運行與上位監控的對應關系,在一臺PC機上實PLC的仿真運行和上位監控。
2.2 虛擬實驗的應用方法
只需要有一臺PC機,學生就可完一個具有上位監控和下位PLC運行的完整PLC實驗系統設計。學生通過這種實驗系統,既掌握了PLC的程序設計和調試方法,又學會了上位組態軟件的監控設計。其設計可以分兩種形式:
(1)由教師開發上位監控系統,并進行相應的通道連接,學生無需考慮所有設定與上位監控系統的連接。教師提供相應的連接地址給學生,學生按提供的地址編程,僅僅進行下位PLC的設計即可和上位監控界面接通。上位監控系統既可控制PLC,又可形象逼真地反應實際的控制過程和PLC程序運行效果,形象直觀。(2)學生首先設計PLC程序,并進行GXSimulator的仿真調試。根據程序的上位監控要求,進行上位監控組態窗口的設計,然后通過MX Component進行通信連接,完成一個完整PLC系統設計實驗。雖然是全虛擬的設計,但其設計方法與實際工業應用開發完全一致,所以具有很好的實用性和遷移性。
3、工業清洗機全虛擬控制系統的實現
下面給出全虛擬PLC工業清洗機控制系統,采用易控組態軟件進行上位監控設計,以該實例展現全虛擬PLC應用的方法和過程。
3.1 工業清洗機控制系統分析與PLC編程調試
工業清洗機工作流程如下:
將欲清洗的工件置于掛籃中,將掛籃放置在掛桿上,按下啟動按鈕,掛桿向下運動將工件置于清洗液中,加熱清洗液至沸騰,啟動超聲波生器工作20分鐘后,超聲波發生器停止工作,掛桿向上運動將工件置于蒸汽中5分鐘,停止加熱,啟動噴淋5分鐘,其后停止噴淋,取出工件于傳送帶上,按下清洗結束按鈕,啟動傳送帶工作。
按以上工作流程要求在GX Developer編寫梯形圖控制程序,將編寫好的部分梯形圖程序寫入虛擬PLC(既啟動LLT),進入虛擬仿真調試,完成工業清洗機的PLC控制系統的編程調試。
3.2 基于易控組態軟件的上位監控界面設計
(1)組建系統工程:首先運行易控組態軟件進入組態畫面,分析工業清洗機控制系統工程項目結構,建立工程結構框架。本控制系統包含掛籃、啟/停按鈕、清洗罐、加熱器、超聲波生器、冷凝器、抓手、傳送帶和幾個傳感器等。從組態軟件的“對象元件庫”選取并置于用戶窗口的適當位置。控制界面如圖2所示。(2)制作動畫顯示畫面:將用戶窗口中圖形對象與實時數據庫中的數據對象建立相關性連接,并設置相應的動畫屬性。(3)運行策略:
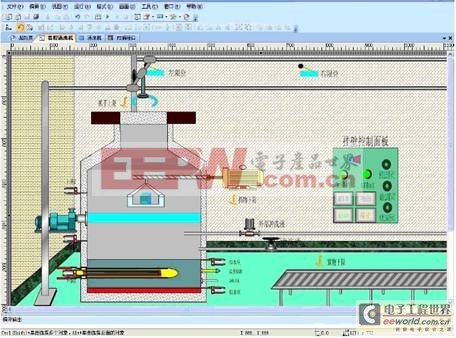
圖2 上位機界面運行圖
本設計為了生動地表現當啟動按鈕按下,掛桿向下運動、噴淋閥門打開(通過變色顯示)以及傳感器動作等復雜的動畫顯示及關聯過程,采用了腳本程序在運行策略中的循環策略來仿真其工作的過程。(4)設備窗口組態:打開易控組態軟件后,分別在“IO通信”與“變量”
選項中添加控制量信息。然后進行相應的通信參數連接設置。
3.3 虛擬通道連接與上下位綜合調試
(1)基于易控組態軟件的上位監控界面與GX Simulator的連接:打開MX Component應用軟件,設置其與GX Simulator虛擬通道的連接。(2)運行易控組態軟件,按動圖2所示控制面板上的啟動按鈕,則PLC開始運行,圖2中的掛籃會依程序的運行自動下降,所示畫面完全跟隨PLC的運行動畫顯示,其指示燈變亮、加熱器變色、噴淋閥打開時噴出沖洗液。這樣,具有上下位控制的工業清洗機全虛擬PLC控制系統實驗就形象、逼真的完成了。
通過以上實例的介紹,可以看到本文所提出的全虛擬PLC實驗方法的簡潔性,在安裝有以上所需軟件的PC機上便可完成實際現場PLC控制的全部模擬過程。
本文比較闡述了PLC各種實驗室應用方法的不同及不足、研究了全虛擬PLC教學實驗室的實現方法及其在工業清洗機中的應用。在與傳統PLC教學實驗方法對比后表明本文所構建的全虛擬仿真系統徹底擺脫了實驗室,實現了只需要PC機和相關軟件即可實現高水平PLC實驗目的,搭建了一個隨處可實現的PLC良好自學平臺,其實驗內容不受實驗室儀器設備、實驗材料的限制,即可以很方便的更新、增加實驗內容,解決了PLC實驗的瓶頸問題,尤其是對成人教育中采用業余及函授形式的學生學習PLC具有特別重要的意義。該實驗方法將PLC的高水平實驗在時間和空間上進行了最大限度的延伸,提供了高性價比的學習模式。具體教學應用表明,該方法是行之有效的、可行的,對提高學生的PLC應用水平起到積極的作用。

西門子plc相關文章:西門子plc視頻教程
評論