基于NiosⅡ的超聲電機(jī)驅(qū)動控制電路

2 實驗分析
2.1 超聲電機(jī)速度穩(wěn)定性研究
由于超聲電機(jī)在一定的頻率范圍內(nèi),它的速度隨著頻率的增大而減小,因此我們可以通過控制正弦信號的頻率來保證超聲電機(jī)速度的穩(wěn)定性。
本實驗使用的直線超聲電機(jī)在33.8 kHz附近運行的比較穩(wěn)定,所以選用33.8 kHz作為直線超聲電機(jī)的實驗頻率。首先研究直線超聲電機(jī)在不加入任何的控制算法時,它的速度穩(wěn)定性,實驗結(jié)果如圖5所示。
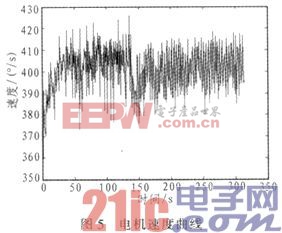
由上圖可以看出不加控制算法直接運行,超聲電機(jī)的速度不是很穩(wěn)定。如果在Nios II處理器中加入一些控制算法去控制電機(jī)運行時的頻率,速度的穩(wěn)定性會有顯著的改善。以增量式PID算法為例:
△u(k)=A1e(k)+A2e(k-1)+A3e(k-2)
u(k)是頻率,e(k)是第K次采樣時目標(biāo)速度與當(dāng)前速度的差值。通過上面的公式算出頻率的改變量,發(fā)送新的頻率控制字給DDS模塊,改變驅(qū)動信號的頻率,從而達(dá)到控制電機(jī)運行速度的效果。圖6為加入PID算法后電機(jī)的速度曲線。
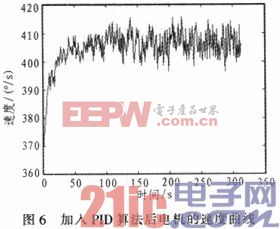
由此可見,引入控制算法的超聲電機(jī)驅(qū)動,電機(jī)的速度波動要遠(yuǎn)遠(yuǎn)的小于直線超聲電機(jī)在不引入算法時的波動。這很好的解決了直線超聲電機(jī)在運動過程中的速度穩(wěn)定性問題。
2.2 定位精度測試
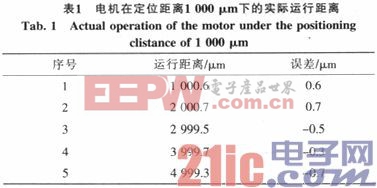
對一個單軸直線超聲電機(jī)運動平臺進(jìn)行精確定位實驗。此精密運動平臺在脈沖寬度為3.5μs時有著比較穩(wěn)定的輸出特性,步進(jìn)距離大約在100 nm左右。使用“連續(xù)+步進(jìn)”的方式進(jìn)行精度測試,連續(xù)運動至預(yù)定目標(biāo)處,然后利用微小步進(jìn)進(jìn)行調(diào)整。英國REN-ISHAW公司的XL-80激光干涉儀系統(tǒng)作為本次實驗的測定系統(tǒng),將激光干涉儀顯示數(shù)據(jù)與定位距離進(jìn)行比較。實驗表明,此超聲電機(jī)直線運動平臺的定位精度可以達(dá)到1μm。

3 結(jié)論
文中利用SOPC技術(shù),將波形發(fā)生模塊和微處理器模塊以及脈沖計數(shù)模塊巧妙地集成到一片F(xiàn)PGA內(nèi)部,利用可編程邏輯的靈活性和Nios II的強(qiáng)大處理能力,實現(xiàn)了超聲電機(jī)驅(qū)動控制電路的設(shè)計。采用SOPC方案進(jìn)行系統(tǒng)設(shè)計,充分利用FPGA的可編程性,整個開發(fā)過程變得靈活方便,在不改變?nèi)魏瓮鈬娐返那闆r下可以對系統(tǒng)進(jìn)行軟硬件升級,延長系統(tǒng)的壽命周期,同時大大提升了系統(tǒng)的性能和系統(tǒng)的集成度,降低了系統(tǒng)的開發(fā)成本,這正是相對于其他方案的優(yōu)勢,也符合當(dāng)今科技的發(fā)展方向。


評論