光電二極管檢測電路的工作原理及設計方案

在這個應用電路中,對運放有影響而未模擬的另一個重要性能參數是輸入共模范圍和輸出擺幅范圍。一般而言,輸入共模范圍必須擴展到超過負電源幅值,而輸出擺幅必須盡可能地擺動到負電源幅值。大多數單電源CMOS放大器具有負電源電壓以下0.3V的共模范圍。由于同相輸入端接地,此類性能非常適合于本應用領域。當放大器對地的負載電阻為小于RF /10時,則單電源放大器的輸出擺幅可最優化。如果采用這種方法,最壞情況下放大器負載電阻的噪聲也僅為總噪聲的0.5%。
SPICE宏模型可以模擬也可以不模擬這些參數。一個放大器宏模型會具有適當的開環增益頻率響應、輸入共模范圍和不那么理想的輸出擺幅范圍。表1中列出了本文使用的三個放大器宏模型的特性。
光電二極管和放大器的寄生元件對電路的影響可容易地用SPICE模擬加以說明。例如,在理想情況下,可以通過使用ISC的方波函數和觀察輸出響應來進行模擬。
2.3 反饋元件模型
本應用中應該考慮的第三個即最后一個變量是放大器的反饋系統。圖4示出一個反饋網絡模型。
在圖4中,分離的反饋電阻RF也有一個噪聲成分eRF和一個寄生電容CRF。
寄生電容CRF為電阻RF及與電路板/接線板相關的電容。此電容的典型值為0.5pF到1.0pF。
CF是反饋網絡模型中包含的第2個分離元件,用于穩定電路。
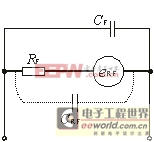
圖4 圖1所示系統反饋電路的
寄生元件模型
表1 本文提到的運放宏模型特性

將三個子模型(光電二極管、運放和反饋網絡)組合起來可組成光檢測電路的系統模型。如圖5所示。
3 系統模型的相互影響和系統穩定性分析
當光電二極管配置為光致電壓工作方式時,圖5所示的系統模型可用來定性分析系統的穩定性。
這個系統模型的SPICE能模擬光電二極管檢測電路的頻率及噪聲響應。尤其是在進入硬件實驗以前,通過模擬手段可以容易地驗證并設計出良好的系統穩定性。該過程是評估系統的傳輸函數、確定影響系統穩定性的關鍵變量并作相應調整的過程。
該系統的傳輸函數為
![]() (2)
(2)
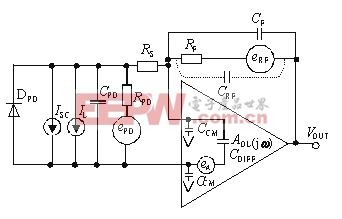
圖5 標準光檢測電路的系統模型
式(2)中,AOL(jw )是放大器在頻率范圍內的開環增益。b 是系統反饋系數,等于1/(1+ZF/ZIN)。1/b 也稱作系統的噪聲增益。
ZIN是輸入阻抗,等于RPD//1/[jw (CPD+CCM+ CDIFF)];ZF是反饋阻抗,等于RF //1/[jw (CRF+CF)]。
通過補償AOL(jw )′ b 的相位可確定系統的穩定性,這可憑經驗用AOL(jw )和1/b 的Bode圖來實現。圖6中的各圖說明了這個概念。
開環增益頻率響應和反饋系數的倒數(1/b )之間的閉合斜率必須小于或等于-20dB/10倍頻程。圖6中(a)、(c)表示穩定系統,(b)、(d)表示不穩定系統。在(a)中,放大器的開環增益(AOL(jw ))以零dB隨頻率變化并很快變化到斜率為 -20dB/10倍頻程。盡管未在圖中顯示,但這個變化是由開環增益響應的一個極點導致的,并伴隨著相位的變化,在極點以前開始以10倍頻程變化。即在極點的10倍頻程處,相移約為0° 。在極點發生的頻率處,相移為-45° 。當斜率隨著頻率變化,到第二個極點時開環增益響應變化至-40dB/10倍頻程。并再次伴隨著相位的變化。第3個以零點響應出現,并且開環增益響應返回至-20dB/10倍頻程的斜率。
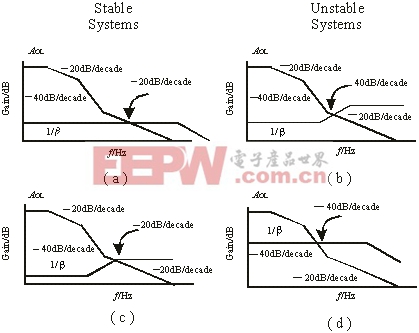
圖6 確定系統穩定性的Bode圖
在同一個圖中,1/b 曲線以零dB開始隨頻率變化。1/b 隨著頻率的增加保持平滑,直到曲線末尾有一個極點產生,曲線便開始衰減20dB/10倍頻程。
圖(a)中令人感興趣的一點就是AOL(jw )曲線和1/b 曲線的交點。兩條曲線交點的斜率示出了系統的相位容限,也預示著系統的穩定性。在圖中,交點斜率為-20dB/10倍頻程。在這種情況下,放大器將提供-90° 的相移,而反饋系數則提供零度相移。相移和系統的穩定性均由兩條曲線的交點決定。1/b 相移和AOL(jw )相移相加,系統的相移為-90° ,容限為90° 。從理論上說,如果相位容限大于零度,系統是穩定的。但實際應用中相位容限至少應有45° 才能使系統穩定。
在圖6的(c)中,AOL(jw )曲線和1/b 曲線的交點表示一個在一定程度上穩定的系統。此點 AOL(jw )曲線正以-20dB/10倍頻程的斜率變化,而1/b 曲線正從20dB/10倍頻程的斜率轉換到0dB/10倍頻程的斜率。AOL(jw )曲線的相移為-90° 。1/b 曲線的相移則為-45° 。將這兩個相移相加后,總的相移為-135° ,即相位容限為45° 。雖然該系統看上去較穩定,即相位容限大于0° ,但是電路不可能像計算或模擬那樣理想化,因為電路板存在著寄生電容和電感。結果,具有這樣大小的相位容限,這個系統只能是“一定程度上的穩定”。
圖6中(b)、(d)均為不穩定系統。在(b)圖中,AOL(jw )以-20dB/10倍頻程的斜率變化。1/b 則以+20dB/10倍頻程的斜率變化。這兩條曲線的閉合斜率為40dB/10倍頻程,表示相移為-180° ,相位容限為0° 。
![]() 在(d)圖中,AOL(jw )以-40dB/10倍頻程的斜率變化。而1/b 以0dB/10倍頻程的斜率變化。兩條曲線的閉合斜率為-40dB/10倍頻程,表示相移為-180° 。
在(d)圖中,AOL(jw )以-40dB/10倍頻程的斜率變化。而1/b 以0dB/10倍頻程的斜率變化。兩條曲線的閉合斜率為-40dB/10倍頻程,表示相移為-180° 。
通過模擬可表明使用非理想的光電二極管和運放模型會造成相當數量的振鈴或不穩定因素。在頻率域內重新進行這種模擬會很快重現這種不穩定因素。
系統的不穩定性可用兩種方法校正:(1)增加一個反饋電容CF;(2)改進放大器,使其具有差分AOL頻率響應或差分輸入電容。
![]() 改變反饋電容。系統中影響噪聲增益1/b 頻率響應的有光電二極管的寄生電容、運放的輸入電容,其阻抗以ZIN表示,放大器反饋環路的寄生元件,其阻抗以ZF表示。
改變反饋電容。系統中影響噪聲增益1/b 頻率響應的有光電二極管的寄生電容、運放的輸入電容,其阻抗以ZIN表示,放大器反饋環路的寄生元件,其阻抗以ZF表示。
ZIN = RPD //1/[ jw (CPD+CCM+CDIFF)]
ZF = RF //1/ [jw (CRF+CF)] (3)
1/b = 1+ZF/ZIN
噪聲增益1/b 曲線的極點、零點如圖7所示。開環增益頻率響應和反饋系數的倒數1/b 間的閉合斜率必須小于或等于20dB/10倍頻程。
在圖7中,極零點頻率如下:
fP1=1/(2p (RPD//RF)(CPD+CCM+CDIFF+CF+CRF))
fP2 =1/(2p RS CPD)
fZ=1/(2p RF(CF+CRF)) (4)
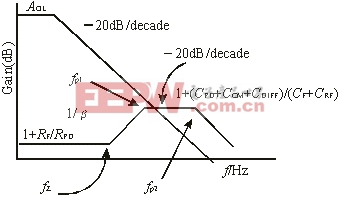
圖7 噪聲增益1/b 曲線的極零點圖
從式(4)中容易地看出,加大CF將降低fP1,并降低高頻增益[1+(CPD+CCM+CDIFF)/(CF+CRF)]。
1/b 網絡的極點設計成1/b 與放大器的開環增益曲線相交的那一點。此時頻率就是這兩條曲線的幾何平均值。CF可計算如下
![]() (5)
(5)
式(5)中fU是放大器的增益帶寬積。此時,系統具有45° 的總相位容限,階躍響應將呈現25%的過沖。對于使用MCP601放大器的電路,CF的值將為
![]()
這種最佳的計算結果是建立在假設放大器參數如帶寬或輸入電容以及反饋電阻值沒有改變,二極管的寄生電容也無改變基礎上的。
較保守的計算方法CF的取值為
![]()


評論