新型步進(jìn)電機(jī)驅(qū)動電路的研制

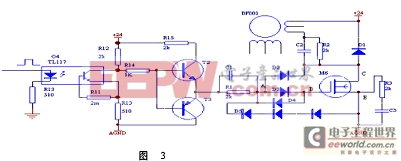
圖3是該驅(qū)動電路其中一相的電路示意圖。如圖所示,O4為光耦。當(dāng)輸入端為高電平時,T2三極管(NPN)導(dǎo)通,T3三極管(PNP)截止,M6功放管工作在截止?fàn)顟B(tài)。圖中電阻R2、二極管D1和電容C3的作用于前面初步方案一樣,在此不再贅述。在R2兩端并聯(lián)電容C2作用是在M6管由截止到導(dǎo)通的瞬間,使電源電壓全部落在繞組上,使電流上升更快,從而提高電機(jī)對脈沖電流的響應(yīng)速度,因此C2又稱作加速電容。二極管D2作用是臨界飽和負(fù)反饋,它與D3管相互配合,使M6管在導(dǎo)通時始終工作在飽和狀態(tài),另外它還有使M6加速向飽和狀態(tài)轉(zhuǎn)換的的作用。電容C1和二極管D4、D5起快速關(guān)斷作用,即當(dāng)M6管導(dǎo)通時,C1兩端的電壓通過T3和D5回路釋放出來,從而在E、A兩端產(chǎn)生一個電勢差,由于D5比D4多了兩個二極管,因此就在M6的BE結(jié)形成一個1.4V的反電勢,從而大大縮短了M6由飽和向截止?fàn)顟B(tài)切換的時間。
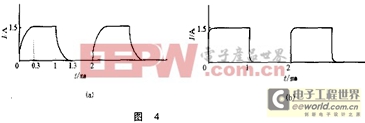
經(jīng)過對初步電路方案的改進(jìn)后,大大提高了單電壓驅(qū)動電路對脈沖電流的快速響應(yīng)性,并很好地改善了繞組中的電流波形。圖4示出了初步方案和改進(jìn)后方案單電壓驅(qū)動電路繞組中的電流波形比較(其中(a)為初步方案電路的電流波形(b)為改進(jìn)后電路的電流波形)。從圖中可清晰的看到改進(jìn)后電路的電流波形近視為矩形波,功放管M6工作在接近理想狀態(tài),這大大提高了步進(jìn)電機(jī)的運行精度。而D2、D5兩個反饋電路以及D1、D3的引入又提高了整個電路的抗干擾能力。
5 總結(jié)
80C196KC對于步進(jìn)電機(jī)的控制,在電路設(shè)計上要考慮功能擴(kuò)充和可靠性等問題,特別在功率驅(qū)動電路的設(shè)計時應(yīng)充分考慮步進(jìn)電機(jī)的運行環(huán)境。改進(jìn)后的單電源功率驅(qū)動回路,通過實際運行試驗,步進(jìn)電機(jī)的控制品質(zhì)優(yōu)良,達(dá)到了油門控制系統(tǒng)的總體要求。本文所述的單電源功率驅(qū)動電路在工業(yè)控制的其他領(lǐng)域具有一定的推廣價值。
參考文獻(xiàn):
1.孫韓芳主編,INTEL 16位單片機(jī),北京航空航天大學(xué)出版社,1999年11月
2.張建明編著,機(jī)電一體化系統(tǒng)設(shè)計 北京理工大學(xué)出版社 1996 年
3.李清泉編著,自適應(yīng)控制系統(tǒng)理論設(shè)計及應(yīng)用,科學(xué)出版社,1990年3月
4.童詩白編著 模擬電子技術(shù)基礎(chǔ) ,高等教育出版社 1988









評論