開關電源的實現數字化控制實現方案

盡管業內不少人都認為,模擬和數字技術很快將爭奪電源調節器件控制電路的主導權,但實際情況是,在反饋回路控制方面,這兩種技術看起來正愉快地共存著。
的確,許多電源管理供應商都提供了不同的方案。一些數字控制最初的可編程優勢現在甚至在采用模擬反饋回路的控制器和穩壓器中也有了。當然,數字電源還是有一些吸引人之處。
本文主要討論脈沖寬度調制(PWM)、脈沖密度調制(PDM)和脈沖頻率調制(PFM)開關穩壓器和控制器IC。其中一些集成了控制實際開關的一個或多個晶體管的驅動器,另一些則沒有。還有一些甚至集成了開關FET,如果它們提供合適的負荷的話。因此,數字還是模擬的問題取決于穩壓器的控制回路如何閉合。
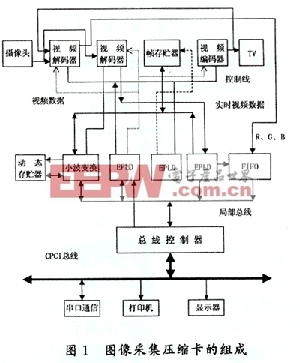
圖1顯示了兩種最常見的PWM開關拓樸布局的變化,降壓和升壓(buck/boost)轉換器。在同步配置中,第二只晶體管將取代二極管。在某種意義上來講,脈沖寬度調制的采用使得這些轉換器“準數字化”,至少可與基于一個串聯旁路元件的723型線性穩壓器相比。事實上,PWM使得采用數字控制回路成為可能。不過,圖1中的轉換器缺少控制一個或幾個開關占空比的電路,它可在模擬或數字域中實現。
不管采用模擬還是數字技術,都有兩種方式實現反饋回路:電壓模式和電流模式。簡單起見,首先考慮它在模擬域中如何實現。
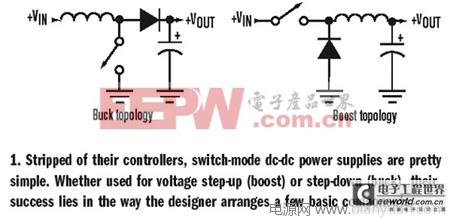
圖1: 沒有控制器的開關模式DC-DC電源十分簡單。不論用于升壓還是降壓,其成功與否取決于設計者如何安排一些基本的元器件。
在電壓模式拓樸中,參考電壓減去輸出電壓樣本就可得到一個與振蕩器斜坡信號相比較的小誤差信號(圖2),當電路輸出電壓變化時,誤差電壓也產生變化,后者反過來改變比較器的門限值。反過來,這將使輸出信號寬度發生變化。這些脈沖控制穩壓器開關晶體管的導通時間。隨著輸出電壓升高,脈沖寬度將變小。
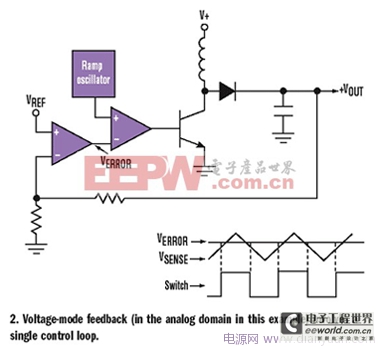
圖2: 電壓模式反饋(本例中在模擬域)包含一個控制回路。
電流模式控制的一個優勢在于其管理電感電流的能力。一個采用電流模式控制的穩壓器具有一個嵌套在一個較慢的電壓回路中的電流回路。該內回路感應開關晶體管的峰值電流,并通過一個脈沖一個脈沖地控制各晶體管的導通時間,使電流保持恒定。
與此同時,外回路感應直流輸出電壓,并向內回路提供一個控制電壓。在該電路中,電感電流的斜率生成一個與誤差信號相比較的斜坡。當輸出電壓下跌時,控制器就向負載提供更大的電流(圖3)。
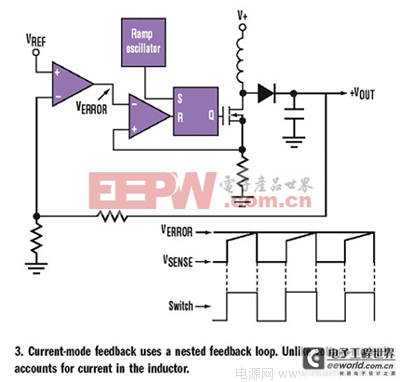
圖3: 電流模式反饋采用了嵌套反饋回路。與電壓模式不同,它需要計入電感上的電流。
在這些控制拓樸中,在回路的相移達到360°的任意頻率處,控制回路的增益不能超過1。相移包括了將控制信號饋入反饋運放的倒相輸入端所產生的固有180°相移、放大器和其它有源元件的附加延遲、以及由電容和電感(特別是輸出濾波器的大電容)引入的延遲。
穩定回路要求對一定頻率范圍內的增益變化和相移進行補償。傳統上,采用模擬PWM來穩定電源通常需要采用經驗方法:你在一塊與生產型電路板相同布局的實際電路板上,實驗各種無源器件的不同組合,并觀察在電源電壓和負載需求變化時的電路時間域響應。最近,事情已變得很簡單。因為現在模擬控制器公司在其自己的型號產品上實現了首先在數字控制器上引入的各種“在寄存器中插入一個值”的功能。
數字控制回路
大多數電壓模式控制的數字實現方案包括了模數轉換器(ADC)、實現一些控制算法的微控制器或DSP、以及一個數字脈沖寬度調制器(DPWM),該DPWM拾取控制器輸出并產生驅動執行開關動作的一個或幾個晶體管所需的信號(圖4)。
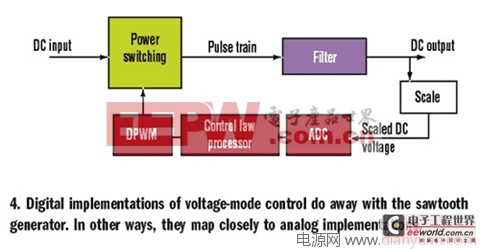
圖4: 電壓模式控制的數字實現消除了鋸齒產生器。在其他方面,它們與模擬實現緊密對應。
首先,ADC產生饋入控制器的一系列輸出電壓的數字表示。控制算法是人們所熟悉的比例積分(PI)或比例積分/差分(PID)算法。
在一個PID控制器(更復雜的實例)中,每個ADC輸入都要執行基于一系列系數的算法。比例系數是與靈敏度相關的增益因子。整數系數按照錯誤出現的時間長短來調節PWM的占空比。誘導系數補償回路的時間延遲(相位更有效)。綜合起來,PID算法的各個系數決定了系統的頻率響應。
控制器隨后將ADC的輸出電壓表示轉換成維持期望的輸出電壓所需的脈沖持續時間(占空比)信息。然后,該信息被傳送至一個DPWM,它執行與模擬PWM一樣的驅動信號產生功能。
注意模擬和數字控制方案管理開關晶體管的不同。模擬控制器在時鐘上升沿觸發開關晶體管成ON狀態,并在電壓坡度達到預設的門檻電壓時將晶體管觸發成OFF狀態;PID控制器則計算開關晶體管ON和OFF狀態期間所需的持續時間。
理論上,模擬控制可以提供連續精度的輸出電壓。但ADC精度和采樣率的交互作用再加上DPWM開關速率,使事情變得有些復雜。
例如,DPWM必須具有比ADC更高的精度。否則,ADC輸出的1-LSB變化就可能導致DPWM使輸出電壓變化大于1-LSB。其結果是,輸出電壓就穩定地在兩個數值之間轉換,這個狀態被稱之為“限制性循環”。
不過,避免循環也不是輕而易舉的。這是因為要提供DPWM更高的精度就意味著必須提高其脈沖速率(脈沖速率決定了在任一給定時間段能夠產生多少比特)。然而,DPWM脈沖速率限制了它對所有來自控制器的比特進行壓縮的時間。Artesyn白皮書中的例子介紹了一個假設的具有1MHz開關速率和10位ADC的DPWM。計算顯示,調制器要求超過1 GHz的脈沖速率。
當然,如此的高速度是不切實際的,因此數字控制器的設計者必須找到另一種替代解決方案。一種方案是引入一些DPWM時鐘抖動。穩壓器輸出過濾器對饋入的任一脈沖串進行平均,這使對每個mth輸出脈沖的寬度進行相當于1 LSB的調整成為可能。
這將脈沖串的平均值增加或降低了1 LSB精度的1/m倍。如果在控制器輸入端的1-LSB使輸出脈沖串平均變化10mV,這將使每四個脈沖縮短相應于10 mV的時間,那么通過濾波器的平均輸出電壓將降低 10mV/4或2.5mV。
替代解決方法
盡管幾

相關推薦
-
-

-
-

-
-
-
-
-
wobuzhidao | 2007-06-25
-

-

-
-
-
-
-
-
sanhey | 2005-09-12
-

-
-
-
★被水淹死的魚★ | 2003-10-24
評論