一種全自動電飯鍋遠程智能控制系統的設計方案

隨著物聯網和軟件技術的快速發展,輕松便捷的煮飯方式越來越受人們青睞,智能、環保、節能型高端電飯鍋將會成為未來備受矚目的商品,特別是可遠程控制的全自動智能電飯鍋將會成為未來發展的方向。
本文引用地址:http://www.104case.com/article/227080.htm目前國內外對智能家居的技術研究較多,多數是用無線數據傳輸技術實現,但系統設計成本高。而對電飯鍋的全自動化技術研究則少之有少,沒有引起人們的重視。本文改造了傳統的電飯鍋,設計了可全自動化控制的電飯鍋,并采用GPRS模塊,普通手機等簡單、廉價的設備開發出了一款可靠性較好的遠程電飯鍋控制系統,能使電飯鍋及時、適量、準確的為人們做飯。
1 系統的硬件構成及原理
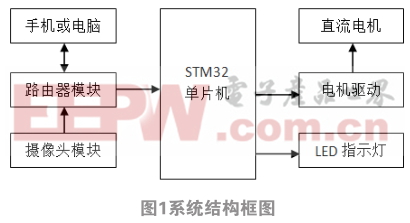
系統總體框圖如圖1所示,設計采用的是模塊化的設計思想,有利于系統的組裝和調試,縮短開發周期。
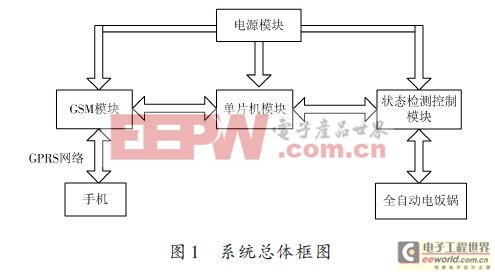
由于電飯鍋信息傳輸的數據量少,時效性要求不是很高,因此系統主要采用基于GSM網絡提供的短信業務。
它的原理如下:手機通過GPRS網絡發送控制短信到GSM 模塊中,單片機通過讀GSM 模塊取得控制命令字并解析得到明確的命令信息,控制繼電器動作,完成對電飯鍋的控制并以短消息的形式將命令執行情況通過GSM模塊反饋到用戶的手機上。
2 系統的各硬件實現
本系統主要由全自動電飯鍋和智能控制電路系統組成。全自動電飯鍋在傳統電飯鍋的基礎上添加機械裝置改造而成,智能控制電路系統則由電源模塊、GSM模塊、單片機模塊、狀態檢測和控制模塊四個主要部分組成。
2.1 全自動電飯鍋的設計
傳統的電飯鍋無論是保溫自動式、定時保溫式、還是新型的微電腦控制式,在實時方面已得到長足的發展,但仍然存在明顯的缺陷與不足,如定時時間過長會影響飯的口感等,有效地解決目前電飯鍋存在的各種缺陷,是創新與發展的方向。其中電飯鍋的全自動化和遠程智能控制是未來電飯鍋技術發展的一個方向,要實現電飯鍋全自動控制,全自動電飯鍋是前提,本文結合全自動洗衣機的設計思想,在傳統電飯鍋的基礎上,通過增加適當的機械裝置,設計出來的全自動電飯鍋如圖2所示。
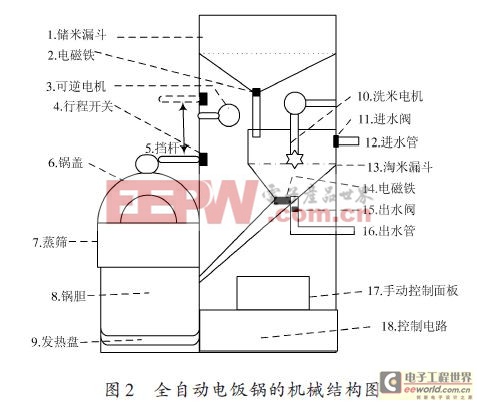
設計包括儲米、取米、淘米、放米以及加水裝置。頂端漏斗為儲米裝置,直徑25 cm,高12 cm,可一次性存放約5 kg大米。取米裝置由儲米漏斗底端的電磁鐵實現,電磁鐵選用直流電磁鐵HCNE1-1039,由于卡槽采用傾斜設計,減小了米粒的摩擦阻力。淘米裝置由洗米電機和淘米漏斗構成,其中洗米電機選用TN-40.180/HC685G100618.
放米裝置由電磁鐵和檔桿構成,電磁鐵同樣選用HCNE1-1039,檔桿由可逆電機控制,可以升降,采用行程開關限位,實現電飯鍋鍋蓋的開閉。加水裝置由電磁閥和進水管構成,電磁閥選用2W160-15.總的機械動作有儲米、取米、淘米、放米以及加水等,單片機接收到控制命令后通過I/O輸出高低電平控制繼電器來實現。
2.2 智能控制電路系統的設計
2.2.1 電源模塊設計
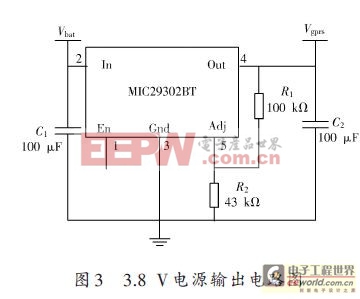
GTM900C 在上電啟動,登陸GPRS 網絡,發送數據等過程中,通常有較高的電流消耗[3],最高達2 A,故電源芯片必須滿足至少2 A 的最大電流供給。電源電路主要由MIC29302 -BT組成,其芯片產生3.8 V電壓,給單片機和GTM900C模塊供電,如圖3所示,該電路基本能滿足條件。另外1腳是使能端,可接到單片機端口使在不進行聯網時芯片不工作,降低功耗。
2.2.2 單片機模塊設計
系統MCU選用美國德州儀器公司生產的MSP430系列單片機MSP430F149.它是一款低電壓(1.8~3.6 V),高性能16位單片機,其中斷源多,可以任意嵌套,使用時很靈活。此單片機還具有低功耗空閑和掉電模式,支持軟件設置睡眠和喚醒,能滿足本系統需求。
2.3 GSM模塊設計
出于制作成本和兼容性的考慮,系統采用華為公司的GTM900C芯片,由于單片機的I/O口邏輯電平為3.6 V,與GTM900C的I/O口2.85 V的邏輯電平相差不大,所以無需電平轉換就能進行硬件對接。GSM模塊和單片機的連接較簡單,將兩者串口接好,在單片機端將串口參數設置好即可發送相應的AT指令對模塊進行操作。GSM模塊與單片機的連接情況如圖4 所示。通信速率為9 600 Kb/s,采用8位異步通信方式。


評論