垂直侵徹深度計算算法研究

令系統的總擾動項a(t)=f(y,t)+w(t)+(b-b0)u(t),該擾動項包括內部擾動f(y,t)+(b-b0)u(t),也包含外部擾動W (t)。把a(t)作為一個擴張的狀態,令x1=y,x2=a(t),則式(6)的動態系統可寫成如下狀態方程:

式(7)中,令c(t)=a(t),則可以構造出線性ESO:
式中,-p為觀測器二重極點,p>0。
對應的線性控制律為:
式中,y*為系統的參考輸入。
這是一個二階連續系統,其穩定的充要條件是二重極點P>0。只要選擇合適的期望閉環極點-P>(p>0),就能保證ESO的觀測效果。
根據永磁同步電機的一階微分方程模型,結合擴張狀態觀測器的設計方法,設計控制器,分析如下:

![]()
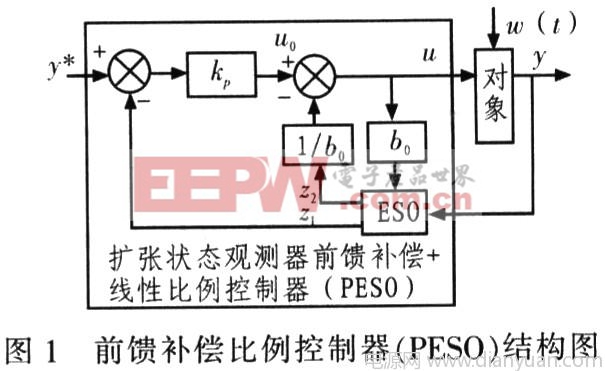
由式(11)~(12)可看出,負載轉矩、摩擦系數、慣量的擾動以及由于b0估計誤差所造成的擾動都可在a(t)中反映出來。如果能對a(t)進行觀測并予以補償,則可顯著的提高系統的抗擾動能力。控制器結構圖如1所示。
于是得到基于擴張狀態觀測器的比例控制器的表達式:
(1)ESO表達式:
(2)控制律表達式:
根據理論分析,ESO的觀測效果取決于極點-p>(p>0)。和ESO的跟蹤速度有關,P越大,ESO跟蹤輸出信號響應就越快,即z1對速度w的響應就越快。比例增益kp通常應取得較大,但過大會使速度響應振蕩,造成系統不穩定。
4 基于擴張狀態觀測器的控制器算法仿真
在Matlab/Simulink平臺仿真驗證基于擴張狀態觀測器的控制器設計方案。根據圖1搭建控制器的Matlab/Simulink仿真模塊,如圖2所

評論