新能源最給力:實時內核的電動車電子差速仿真

CAN/USB網關是連接本實驗系統中上位PC機與電動車實物模型的橋梁,是實現現場數據采集的重要設備。該網關完成了CAN總線與USB線的物理接口及協議轉換,具有雙向通信及一定的數據緩沖能力;支持USB2.O高速傳輸協議,通過編程可以支持傳輸速度最高達1Mb/s的CAN總線通信。
5.4 電子差速算法實驗平臺的試驗結果
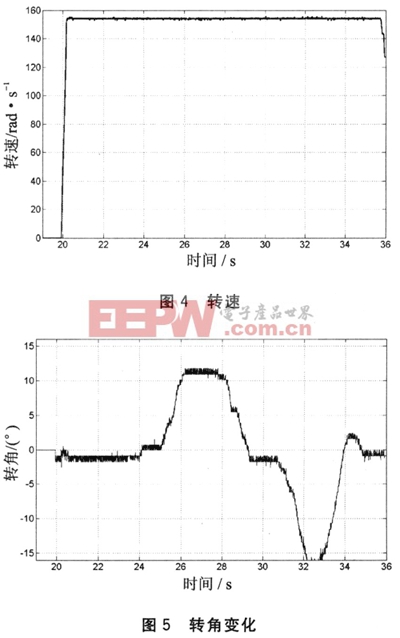
在不考慮加速度信號的影響下,轉角發生變化時,利用該平臺得出各輪速度變化。轉速設定如圖4所示,轉角變化如圖5所示。
隨著轉角的變化,各個輪子速度變化如圖6所示。
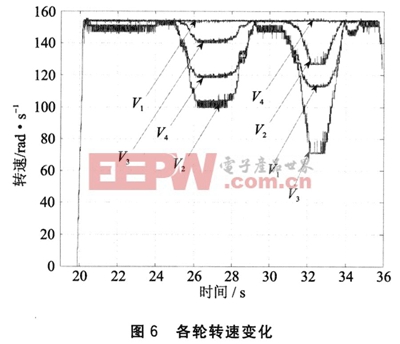
從圖6中可以看出,轉角各個變化過程中對應各輪速度的變化。當轉角由O增大到最大值時(向右轉向),V1為前軸外側輪,速度最大,即V1為 Vref(Vs),此時的目標車速Vs(V1)為轉角為O時的車速,故V1保持不變,V2、V2、V4根據電子差速算法相應的減小;當轉角為最大值時,V2、V3、V4減小的趨勢停止,隨后轉角由最大值減小到0時,V2、V3、V4增大到與V1相同。當轉角由0減小到最小值時(向左轉向),V4為前軸外側輪,速度最大,即V4為Vref(Vs),此時的目標車速Vs(V4)為轉角為O時的車速,故V4保持不變,V1、V2、V3根據電子差速算法相應的減小;當轉角為最小值時,V1、V2、V3減小的趨勢停止,隨后轉角由最小值增大到O時,V1、U2、V3增大到與V4相同。
6 結 論
系統中的電子差速算法是以車輪轉速為控制目標,此算法較為簡單。但也存在著一定的問題,它只較適合于低轉速小轉角或直線行駛的情況;在轉速和轉角都較大時,此時車體運動的離心力產生的側翻力矩起決定性的作用,可能會發生滑轉,在泥濘等復雜路況下也難以適用。由于試驗的條件所限,無法采用適合于復雜路面情況的,基于滑移率或是基于驅動輪附著力的電子差速算法。






評論