基于單片機及FPGA的舞臺吊桿控制器的設計

3 舞臺吊桿控制器的軟件設計
舞臺吊桿控制器的軟件主要包括:主程序、UDP數據的傳輸與解析程序、串口數據的發送程序、數據存儲程序等。
3.1 通信協議設計
在舞臺吊桿控制系統中,遠程控制端通過局域網采用UDP/IP協議給舞臺吊桿控制器發送命令并接收來自控制器的數據包。UDP/IP數據包的格式如下:
| IP HEADER(20 Bytes) | UDP HEADER(8 Bytes) | UDP DATA(Variable Length) |
在使用該協議時,命令信息和狀態數據都在UDP DATA數據區。為了完成控制目的,必須對這塊數據區的數據制定協議,協議格式如表1所示。
表1 協議格式
| 命令號 | 輔命令/錯誤號 | 上行方向位 | 下行方向位 | 功能號 | 位置數 |
| 1Byte | 1Byte | 2Byte | 2Byte | 8Byte | 4Byte |
3.2 主程序設計
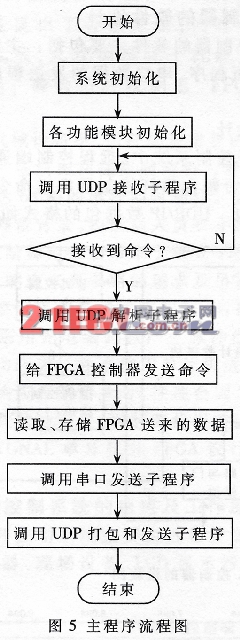
主程序主要完成單片機和各個功能模塊的初始化、對各個功能模塊的調用以及對FPGA控制器的控制。由于篇幅關系,只給出主程序的流程圖,如圖5所示。
4 可靠性設計
4.1 電機慣性引起誤差的補償方法
在電機拖動系統中,要考慮電機的慣性問題以便及時進行誤差補償。目前系統中,大都利用一次或二次函數來近似電機的慣性量。而本系統則采用在遠程控制端人工輸入補償系數Q的方法來實現誤差補償。這里的補償系數Q的測量可在排演時進行。
系統工作時,遠程控制端需設定路標要運行到的位置,即計數終值和誤差補償系數。當接收到補償系數測量命令時,控制系統將開始測量補償系數Q。這里假設輸入終止位置值為S1,實際終止位置值為S2,那么Q=(S2-S1)/S1×100%(由于慣性的緣大處著眼,S2>S1)。接著控制系統把這個誤差補償系數Q送回給遠程控制器,并且存入存儲器中。在吊桿實際運動時,控制系統都會對輸入值進行誤差補償,即:實際運行終止值S=輸入值S1-輸入值S1×Q。用此方法得到的電機慣性量非常精確。
4.2 系統的抗干擾設計
為了保證舞臺吊桿控制器能夠長期可靠地運行,系統在硬件和軟件兩方面采取了有效的抗干擾措施。其中硬件方面主要采取了3.3V電源和5V電源隔離(它們與電磁隔離)、“看門狗”等方法。通過電源隔能夠有效地防止電源電平不穩和其它電器對控制器的干擾,保證了系統的穩定性;通過“看門狗”能保證程序的正常運行,保證了系統的可靠性。軟件方面采取了軟件陷阱等方法。
行前研制的大規模舞臺控制系統使用8044單片機完成數據處理及計數功能,通過BitBusU總線完成通信功能。由于單片機的任務非常繁重,在實際應用中經常出現脈沖丟失以及系統相應速度慢的問題。而本設計采用了EDA技術,將舞臺吊桿控制器用CYGNAL單片機和FPGA實現,并且UDP/IP協議實現局域網內的通信,解決了上述問題。舞臺控制系統現場應用表明,該吊桿控制器性能完全達到了要求。










評論