CPLD在雙軸位置檢測系統(tǒng)中的應用設計

1 引言
數控機床的加T精度主要南位置檢測系統(tǒng)的精度決定,位置檢測系統(tǒng)一般包括傳感器(旋轉變壓器,光電編碼器,光柵)、四倍頻鑒相電路、計數電路等,系統(tǒng)通過這些檢測電機的位移和速度,發(fā)出反饋信號,從而構成閉環(huán)或半閉環(huán)控制。形成差值控制電機,進而提高機床加工精度。數控機床位置檢測系統(tǒng)采用模塊化和開放式控制,可減少電路規(guī)模和提高數控機床的加工精度,形成高密度、高精度的數控機床。采用數字電路的傳統(tǒng)位置檢測系統(tǒng)面積龐大、精度不高、發(fā)應速度慢,而采用CPLD器件代替數字電路正好彌補這些缺陷。
2 CPLD簡介和器件選型
利用可編程邏輯器件CPLD(Complex Programable Logic Device)設計硬件系統(tǒng)非常方便。工程師通過傳統(tǒng)的原理圖輸入法,或是硬件描述語言自由設計數字系統(tǒng)。通過軟件仿真驗證事先設計的正確性。在PCB完成后,還可利用CPLD在線修改能力,隨時修改設計而不必改動硬件電路。因此,使用CPLD可大大加快硬件電路設計進程,減少PCB面積,提高系統(tǒng)可靠性。
根據所需邏輯門數量以及將與其連接的電路引腳數,選用ALTERA公司的EPM570T144C5型CPLD,該器件采用TQFP144封裝,內部有570個邏輯單元,相當于440個宏單元,而此前常用的EPM7128只有128個宏單元。
EPM570T144C5內部有2個I/O分區(qū),共116個通用I/O,引腳延時為8.8 ns,滿足位置檢測系統(tǒng)所需的90多個通用I/O和延時不超過10 ns的設計要求。
3 位置檢測系統(tǒng)組成
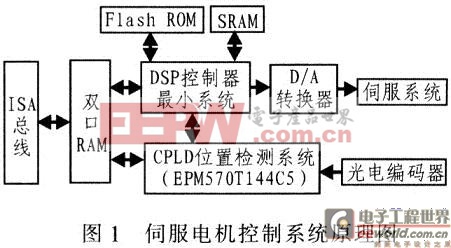
在介紹位置檢測系統(tǒng)前,先簡要介紹伺服電機控制系統(tǒng)(圖1)。CPLD先對伺服電機光電編碼器上發(fā)出的反饋信號進行譯碼、四倍頻鑒相計數,然后將計數值存入鎖存器,當用于電機控制的DSP控制器對CPLD進行讀操作時,CPLD將鎖存器里的計數值通過三態(tài)門輸出給DSP控制器,由其控制電機的位移和速度。
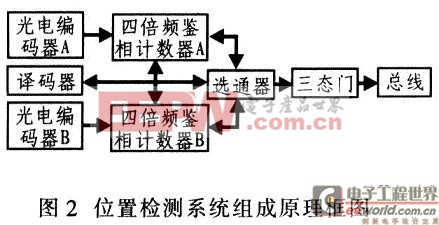
位置檢測系統(tǒng)采用CPLD器件實現硬件電路功能,用VHDL語言編程實現譯碼器、四倍頻鑒相計數器、選通器等模塊。圖2為位置檢測系統(tǒng)組成原理圖。圖2 中,光電編碼器A和四倍頻鑒相計數器A(光電編碼器B和四倍頻鑒相計數器B)構成單軸計數電路,將兩個單軸計數電路配合譯碼器、選通器則構成雙軸計數電路,就是用譯碼器控制選通器,以選通兩個計數器的計數結果并傳輸到總線.總線和選通器之間增加三態(tài)門進行控制。這樣就實現雙軸位置檢測。
4 系統(tǒng)設計
該系統(tǒng)設計的主要部分為伺服電機控制系統(tǒng)中的位置檢測系統(tǒng)。在Ouartus II開發(fā)環(huán)境下設計系統(tǒng),系統(tǒng)設計包括四倍頻鑒相計數器、二四譯碼器和選通器的VHDL程序設計,如圖3所示。通過圖2所示的原理框圖,將該系統(tǒng)設計的各個模塊組合起來形成頂層文件,構成雙軸的檢測系統(tǒng)。圖3中YMO模塊為譯碼電路,用來選通哪軸輸出,Y0、Y2用來控制計數器的清零與計數,Y1控制選通器選通,譯碼器真值表如表1所示。











評論