基于多DSP和FPGA的實時雙模視頻跟蹤裝置

(6)目標暫時丟失下目標軌跡外推算法
在跟蹤目標的過程中,目標在視場中可能會被短時遮擋而丟失;另外當目標在視場中停留,則目標可能融入背景,也會出現目標丟失的現象。針對這兩種情況,當目標短時遮擋,根據存儲記憶以前各幀和本幀的目標信息,采用微分線性擬合外推方法預測下一時刻目標的位置。而當目標在視場停留時,首先按目標被遮擋處理,當外推有限步,或是外推到接近邊界時目標仍未出現時,則確定該目標在視場停留,標記停留位置,當目標再次出現時繼續完成跟蹤。
4、系統工作狀態分析
為實現使自動有序的跟蹤,我們確定系統各個跟蹤狀態和各狀態之間的轉換條件。
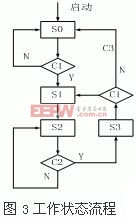
本系統跟蹤狀態有四種:
S0 搜索狀態 發生在系統初始工作或目標完全丟失階段。
S1 捕獲狀態 系統處于發現目標狀態。
S2 正常跟蹤狀態 系統處于對目標的正常跟蹤中。
S3 預測跟蹤 目標偶爾丟失時,系統通過自學習對當前目標進行預測跟蹤,并試圖再捕獲目標。
本系統轉換條件有三種:
C1目標截獲。
C2目標偶然丟失,指目標瞬間丟失,其運動仍具有可預測性。
C3目標深度丟失,指目標丟失一段時間,其運動不可預測
系統狀態轉換情況如圖3所示。在視頻跟蹤裝置啟動并初始化后,進入搜索狀態S0,系統按照一定的掃搜規律進行搜索;當形心跟蹤模塊發現移動目標,則進入捕獲狀態S1;由相關跟蹤模塊對目標進行識別,確認后進入正常跟蹤狀態S2;當目標偶爾丟失時,系統通過自學習對當前目標進行預測跟蹤,并試圖再捕獲目標,進入預測跟蹤狀態S3;如果目標完全丟失,則改變搜索策略,重新再搜索,以便有可能再次捕獲目標。
5、結論
本視頻跟蹤裝置在設計上能完成對移動目標的檢測和跟蹤,初步實驗結果表明采用基于DSP和FPGA的硬件實現算法使系統的實時性能得到很大提高。雙模式的圖像跟蹤算法使系統適合多種背景下的移動目標跟蹤,自適應能力強,抗干擾性能好,具有鎖定目標短暫丟失后的再次捕獲能力,提高了跟蹤的可信度。但本設計擬在下面兩個方面作進一步的研究。一是考慮本裝置的軍事應用背景,需要目標,尤其是遠方目標有相對較高的速度才能觸發系統捕獲,因此沒有考慮攝像頭自身跟蹤時的運動補償[8]。否則,必須加入攝像機運動估計和補償;二是對移動目標的識別能力還需加強,在設定特定跟蹤目標上,尤其是跟蹤到多個移動目標時,不具備區分的能力,需要改進到能識別設定中的跟蹤目標并完成對設定目標的跟蹤。

伺服電機相關文章:伺服電機工作原理












評論