利用LabVIEW和CompactRIO開發慣性檢管器

挑戰:
尋找石油或者天然氣管道的參考位置,并確保空間誤差小于1米
解決方案:
通過使用LabVIEW實時模塊和NI CompactRIO,設計和實現一個實時數據采集和處理系統,以管理在石油或者天然氣管道內部通行的慣性導航系統(INS)的數據。系統實現了對數據的采集、預處理和儲存,還可以利用LabVIEW對數據進行后處理,以獲得最終結果。
"借助于LabVIEW,我們很容易實現對PIG(檢管器)的編程,以滿足任務要求。并且,我們還使用了相同的程序設計語言開發一個后處理程序,以便轉換采集的大多數數據。"PIG(檢管器)是一個用于石油和天然氣管道檢驗的工具,它插入管道中并且借助于關內液體流動產生的壓力前進。PIG可以檢驗管道的變形和異常腐蝕情況,有助于排查可能造成生態事故的故障。為了降低成本并且在監測到異常情況后盡快更換管道,我們必須要知道異常現象的參考位置。慣性PIG被設計用于檢測由地形運動產生的管道移位。
由于慣性PIG在地面以下運行,被管道所屏蔽,我們不可能獲得連續的GPS信號。所以慣性PIG必須使用INS(慣性導航系統)來測量加速度和角速度,并通過綜合的數據分析,獲得儀器的速度、位置和方向。然而,由系統中還夾雜了由偏移和噪音等因素造成的傳感器不精確的問題,隨著時間的推移,定位準確度會下降。
一種避免偏移的有效方式是添加輔助測量。我們使用里程表和一些沿管道的GPS參考導航點,以便及時更新定位的位置。這些GPS標記借助于管道外的傳感器采集到PIG通過的瞬間,并與檢管器的慣性導航系統同步。GPS和INS的結合的測量方式被稱作GPS輔助慣性導航。這種結構允許根據用于動態系統的迭代狀態估計法(卡爾曼濾波器Kalman Filter)進行軌跡的尋跡和登記。雖然設置更多GPS點可以減少系統誤差,但是這需要技術團隊花費更多的準備時間。因此,我們選擇了更節省成本的方案。
執行慣性PIG任務的計算機必須滿足一些要求,包括在啟動之前對現場所有傳感器進行復雜狀態檢查,以避免影響整個任務。它還必須在高采集頻率下,在60多個小時內持續實現對20多個傳感器的管理。由于系統對耐溫性要求高,并且必須能夠抵御超過20G的沖擊,還需要足夠的小以放置到PIG內部,所以目前沒有任何現成可用的硬盤可以在管道內存儲這些數據。因此,我們在PIG內實施了實時統計無損耗浮點數據壓縮法。
我們采用了一個帶有現場可編程門陣列(FPGA)的NI cRIO-9014控制器,它小巧靈活,抗振性好,并且功能強大,足以滿足PIG任務的苛刻要求。我們還使用了強大而易用的LabVIEW開發平臺進行編程。圖一中展示了慣性PIG的硬件架構。
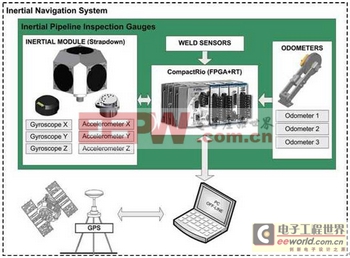
圖1 PIG硬件架構
借助于LabVIEW,我們很容易對PIG進行編程,以滿足任務要求,并且還開發一個后處理程序,以便把采集到的大量數據轉換成管道中焊接點的參考位置。CompactRIO的FTP和TCP功能可以簡化所有采集的數據的采集,還可以使用任何計算機或者PDA遠程配置任務參數。













評論