單片機控制的直流調速系統

5 調節器的設計
5.1 電流調節器的設計
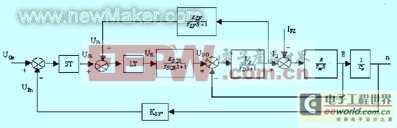
電流調節器的設計參見圖2。
 |
差分方程: Ck=Ck-1+(K1+K2)ek-K1ek-1
其中, K1=K0-K’TLT
K2 = K’TLT
最后帶入已知數據就可設計出電流調節器。
5.2 速度調節器的設計
在本次設計中按二次型性能指標最優控制[8]來設計速度調節器,首先求取速度環的狀態方程,對于單輸入系統,R為常數,選R=1,用計算機離線求出P陣,求出狀態反饋陣為:
K = R-1BTP
若考慮速度調節器采用PI調節器,并加入比例微分負反饋,可以推導出:

6 系統軟件設計
6.1 主程序設計
如圖3所示的主程序流程圖[9],它完成主程序完成系統的各種功能初始化操作。
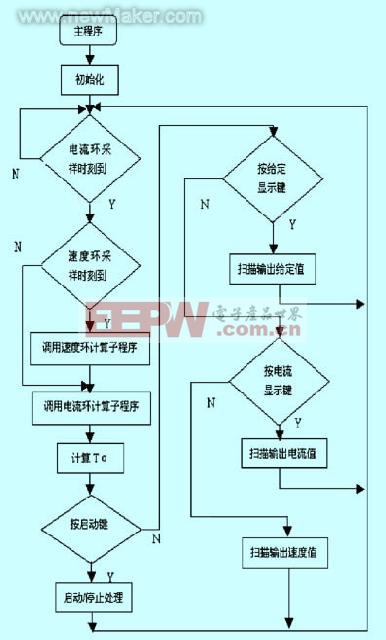 |
圖3 主程序流程圖 |
6.2 電流環中斷服務程序的設計
它主要完成電機索零運算、電流調節器PI運算、輕載時電流自適應的運算。設系統電流斷續臨界值為I0,反饋電流采樣值為I,則程序框圖如圖4所示。
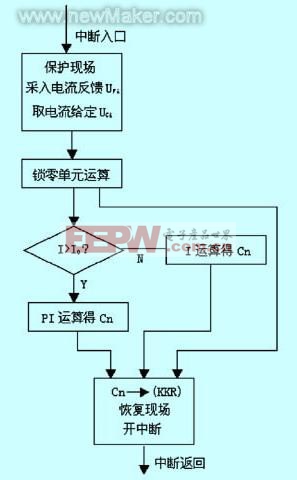 |
圖4 電流環中斷服務程序簡化框圖 相關推薦技術專區 |

評論