基于ARM的智能導航盲杖系統設計

(3)存儲模塊。系統選用兩片64 M×16 bit的Mobile DDR芯片K4X1G163PC,構成共256 MB的內存模塊,以及一片1 G×8 bit的NAND Flash芯片K9G8G08U0M作為外部存儲。內存模塊設計如圖3所示,兩片K4X1G163PC的連接方式相同,使用1.8 V工作電壓,主頻為166 MHz,在處理器內部時鐘為533 MHz時,能夠接近最高使用效率。需要注意的是,在進行PCB布線工作時,兩片內存芯片的地址線和數據線必須進行等長設置。
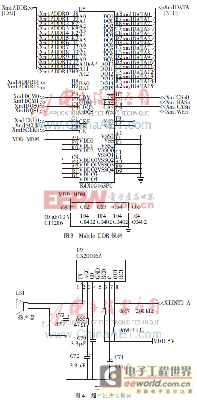
(4)超聲波測障模塊。該模塊使用兩個超聲波換能器,分別完成超聲波發送和檢測接收的任務。發送模塊在設計之初采用反相器74LS04,但在測試過程中發現由于脈沖時間過短,而造成反相器輸出波形不夠理想。經過多次調試比較,最終采用Philips公司的高速反相器74HC04,其在工作電壓VCC為4.5 V時,標準跳變時間可達6 ns,極佳地實現了系統功能。超聲波檢測接收模塊使用CX20106進行信號放大,如圖4所示。
2 系統軟件設計
系統軟件的設計充分利用了硬件平臺提供的資源[2],實現業務流程的有序運行,是整個系統設計的重要組成部分[3]。軟件的設計主要有:(1)建立交叉編譯環境。(2)Windows CE 6.0操作系統(包括驅動)的移植。(3)GPS定位與導航程序設計。(4)超聲波測障功能設計。
2.1 GPS定位與導航模塊軟件設計
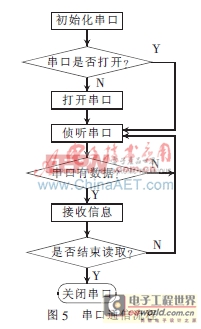
GPS定位與導航模塊首先要完成用戶位置信息的采集、處理與存儲。由于GPS采用串行口通信,所以本文在串行口通信的基礎上實現了對GPS數據的接收、處理和存儲。該模塊軟件設計的基本思想是:首先接收完整的NMEA0183語句,然后提取相關的數據(如時間、經緯度、速度等),再將這些數據發送給中央處理器進行下一步操作,并且可以保存以便日后查看[4]。
本系統使用Lassen iQ的串口1輸出的數據,串口通信流程如圖5所示。所獲取的NMEA0183語句格式為:$GPRMC,162 206,A,3 955.400 7,N,11 612.0591 E,000.0,000.0 181010 002.5,W*71,表示目前的時間是2010年10月18日16點22分06秒(這是UTC時間,不是本地時間,兩者大約相差8小時),位置是北緯39°55.4007′、東經116°12.0591′,速度為0。









評論