基于單片機的交通燈信號控制器設計

設計一個基于單片機的交通燈信號控制器。已知東、西、南、北四個方向各有紅黃綠色三個燈,在東西方向有兩個數碼管,在南北方向也有兩個數碼管。要求交通燈按照表1進行顯示和定時切換,并要求在數碼管上分別倒計時顯示東西、南北方向各狀態的剩余時間。
表1 交通燈的狀態切換表
南北方向 | 東西方向 | ||
序號 | 狀態 | 序號 | 狀態 |
1 | 綠燈亮25秒,紅、黃燈滅 | 1 | 紅燈亮30秒,綠、黃燈滅 |
2 | 黃燈亮5秒,紅、綠燈滅 | ||
3 | 紅燈亮30秒,綠、黃燈滅 | 2 | 綠燈亮25秒,紅、黃燈滅 |
3 | 黃燈亮25秒,紅、綠燈滅 | ||
回到狀態1 | 回到狀態1 | ||
3.2.1模塊1:系統設計
(1)任務分析與整體設計思路
試題要求實現的功能主要包括計時功能、動態掃描以及狀態的切換等幾部分。
計時功能:要實現計時功能則需要使用定時器來計時,通過設置定時器的初始值來控制溢出中斷的時間間隔,再利用一個變量記錄定時器溢出的次數,達到定時1秒中的功能。當計時每到1秒鐘后,東西、南北信號燈各狀態的暫存剩余時間的變量減1。當暫存剩余時間的變量減到0時,切換到下一個狀態,同時將下一個狀態的初始的倒計時值裝載到計時變量中。開始下一個狀態,如此循環重復執行。
動態掃描:需要使用4個數碼管分別顯示東西、南北的倒計時數字,將暫存各狀態剩余時間的數字從變量中提取出“十位”和“個位”,用動態掃描的方式在數碼管中顯示。
整個程序依據定時器的溢出數來計時,每計時1S則相應狀態的剩余時間減1,一直減到0時觸發下一個狀態的開始。
(2)單片機型號及所需外圍器件型號,單片機硬件電路原理圖
圖3-5 交通燈硬件電路原理圖
選用MCS51系列AT89S51單片機作為微控制器,選擇兩個四聯的共陰極數碼管組成8位顯示模塊,由于AT89S51單片機驅動能力有限,采用兩片74HC244實現總線的驅動,一個74HC244完成共陰極數碼管位控線的控制和驅動,另一個74HC244完成數碼管的7段碼輸出,在7段碼輸出口上各串聯一個100歐姆的電阻對7段數碼管限流。用P3口的P3.0-P3.5完成發光二極管的控制,實現交通燈信號的顯示,每個發光二極管串聯500歐姆電阻起限流作用。硬件電路原理圖如圖3-5所示。
(3)程序設計思路,單片機資源分配以及程序流程
①單片機資源分配
單片機P3口的P3.0-P3.1引腳用作輸出,控制發光二極管的顯示。在計時模塊中,需要定義兩個數組變量(init_sn[3],init_ew[3])來存儲東西、南北兩個方向在不同狀態中倒計時的初始值,題目中每個方向的交通燈共有3種顯示狀態,因此數組元素個數為3。還需要定義兩個變量( cnt_ sn, cnt_ ew)暫存東西、南北兩個方向的倒計時剩余時間。
在狀態的切換中,為了明確當前處于哪種狀態,東西、南北方向各設置一個狀態變量(state_val_sn, state_val_ew),當倒計時的剩余時間到零時,狀態變量增1,表示啟動下一個狀態,當該變量增到3時變為0,回到序號為1的狀態。
②程序設計思路
在設計中,由于沒有鍵盤功能,因此只涉及定時計數和動態掃描功能。主程序將變量初始化之
后,設置單片機定時器和中斷特殊功能寄存器的初始值,將定時器T1的工作方式設置為8位自動
裝載模式,定時器每隔250us產生一次溢出。
在初始化變量與寄存器后,主程序進入一個循環結構,在循環中只做動態掃描的工作,根據東西、南北兩向的剩余時時間進行動態掃描顯示。
計時以及狀態的切換通過定時器的中斷服務程序來實現,在中斷服務程序中,每計時到一秒時,則各方向當前狀態的剩余時間減1,一直減到0時觸發下一個狀態的開始,改變交通燈的指示。
③程序流程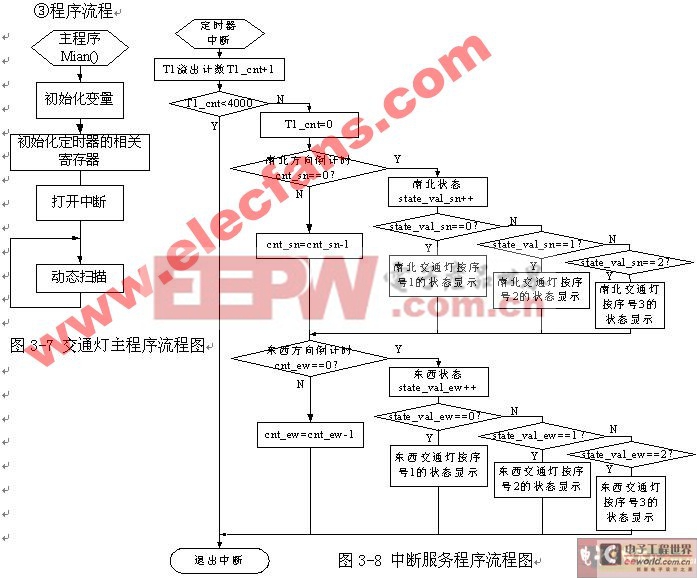
(4)軟硬件調試方案
軟件調試方案:偉福軟件中,在“文件新建文件”中,新建C語言源程序文件,編寫相應的程序。在“文件新建項目”的菜單中,新建項目并將C語言源程序文件包括在項目文件中。
在 “項目編譯”菜單中將C源文件編譯,檢查語法錯誤及邏輯錯誤。在編譯成功后,產生以 “*.hex”和“*.bin” 后綴的目標文件。
硬件調試方案:在設計平臺中,將單片機的P3.0-P3.5分別與獨立式鍵盤的相應位通過插線連接起來。
在偉福中將程序文件編譯成目標文件后,運行“MCU下載程序”,選擇相應的flash 數據文件,點擊“編程”按鈕,將程序文件下載到單片機的Flash中。
然后,上電重新啟動單片機,檢查所編寫的程序是否達到題目的要求,是否全面完整地完成試題的內容。
3.2.2 程序設計(僅供參考的C語言源程序)
//晶振:11.0592M T1-250微秒溢出一次
/*變量的定義:
show_val_sn,show_val_ew: 顯示的值0-59
state_val_sn,state_val_ew: 狀態值 南北方向0-綠燈亮;1-黃燈亮;2-紅燈亮
T1_cnt: 定時器計數溢出數
cnt_sn,cnt_ew: 倒計時的數值
init_sn[3],init_ew[3] 倒計時
led_seg_code:數碼管7段碼
*/
#include "reg51.h"
sbit SN_green=P3^2 ;//南北方向綠燈
sbit SN_yellow=P3^1 ;//南北方向黃燈
sbit SN_red=P3^0 ;//南北方向紅燈
sbit EW_green=P3^5 ;//東西方向綠燈
sbit EW_yellow=P3^4 ;//東西方向黃燈
sbit EW_red=P3^3 ;//東西方向紅燈
unsigned char data cnt_sn,cnt_ew;
unsigned int data T1_cnt;
unsigned char data state_val_sn,state_val_ew;
char code led_seg_code[10]={0x3f,0x06,0x05b,0x04f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
char code init_sn[3]={24,4,29};
char code init_ew[3]={29,24,4};
//------------------------
void delay(unsigned int i)//延時
{ while(--i); }
//------------------------
void led_show(unsigned int u,unsigned int v)
{ unsigned char i;
i=u%10; //暫存個位
P0=led_seg_code[i];
P2=0xbf;
delay(100); //延時
i=u%100/10; //暫存十位
P0=led_seg_code[i];
P2=0x7f;
delay(100); //延時
i=v%10; //暫存個位
P0=led_seg_code[i];
P2=0xfe;
delay(100); //延時
i=v%100/10; //暫存十位
P0=led_seg_code[i];
P2=0xfd;
delay(100); //延時
}
//-------------------------
void timer1() interrupt 3 //T1中斷
{ T1_cnt++;
if(T1_cnt>3999) //如果計數>3999, 計時1s
{ T1_cnt=0;
if (cnt_sn!=0) //南北方向計時
{ cnt_sn--; }
else
{ state_val_sn++;
if (state_val_sn>2) state_val_sn=0;
cnt_sn=init_sn[state_val_sn];
switch (state_val_sn) //根據狀態值,刷新各信號燈的狀態
{ case 0: SN_green=0 ;//南北方向綠燈
SN_yellow=1 ;//南北方向黃燈
SN_red=1 ;//南北方向紅燈
break;
case 1: SN_green=1 ;//南北方向綠燈
SN_yellow=0 ;//南北方向黃燈
SN_red=1 ;//南北方向紅燈
break;
case 2:SN_green=1 ;//南北方向綠燈
SN_yellow=1 ;//南北方向黃燈
SN_red=0 ;//南北方向紅燈
break;
}
}
if (cnt_ew!=0) //東西方向計時
{ cnt_ew--; }
else
{ state_val_ew++;
if (state_val_ew>2) state_val_ew=0;
cnt_ew=init_ew[state_val_ew];
switch (state_val_ew) //根據狀態值,刷新各信號燈的狀態
{ case 0: EW_green=1 ;//東西方向綠燈
EW_yellow=1;//東西方向黃燈
EW_red=0 ;//東西方向紅燈
break;
case 1: EW_green=0 ;//東西方向綠燈
EW_yellow=1 ;//東西方向黃燈
EW_red=1 ;//東西方向紅燈
break;
case 2: EW_green=1 ;//東西方向綠燈
EW_yellow=0 ;//東西方向黃燈
EW_red=1 ;//東西方向紅燈
break;
}
}
}
}
//-------------------------
main()
{//初始化各變量
cnt_sn=init_sn[0];
cnt_ew=init_ew[0];
T1_cnt=0;
state_val_sn=0; //啟動后,默認工作在序號為1的狀態
state_val_ew=0;
//初始化各燈的狀態
SN_green=0 ;//南北方向綠燈亮
SN_yellow=1 ;//南北方向黃燈滅
SN_red=1 ;//南北方向紅燈滅
EW_green=1 ;//東西方向綠燈滅
EW_yellow=1;//東西方向黃燈滅
EW_red=0 ;//東西方向紅燈亮
//初始化51的寄存器
TMOD=0x20;//用T1計時 8位自動裝載定時模式
TH1=0x19;//0x4b; //500微秒溢出一次; 250=(256-x)*12/11.0592 -> x= 230.4
TL1=0x19;
EA=1; //開中斷
ET1=1;
TR1=1; //開定時器T1
while(1)
{ led_show(cnt_sn,cnt_ew);}}
//主程序結束












評論