基于51單片機控制的連續式搗固車起撥道補償設計

我國養路機械的發展起步較晚。長期以來。我國搗固車電氣控制技術都依靠國外進口。由于受制于國外的技術壟斷,因而嚴重阻礙了我國養路機械的發展進程。為了走自主發展的道路,打破現有的國外壟斷局面,擺脫國外技術的控制,實現電氣控制系統的國產化,開發具有自主知識產權的電氣控制系統,本文針對09-32型連續式搗固車起撥道的補償控制技術進行了研究。
傳統的起撥道補償系統大多采用運算電路組成的模擬電路來完成,這種方式控制復雜,系統精度和穩定性都比較差。為此,本文介紹了一種基于單片機的多功能起撥道補償控制系統,因篇幅原因,本文僅介紹撥道補償的算法設計與實驗。
1 撥道補償算法設計
為了使09-32搗固車達到更高的效率并提高操作人員的舒適性,本設計采用連續作業的方式,其主要的作業裝置裝在一個可相對移動的衛星作業小車上。在作業的過程中,大車一直向前運動,作業小車則通過制動系統停下來作業。作業完成后再加速趕上大車。由于測量系統中的C點將隨作業小車的位置不斷變化而變化,C點的撥道正矢也隨C點變化,因此,為了準確撥道,設計時就必須加一個補償值。
1.1 四點法補償算法設計
圖1所示是四點法補償算法的原理圖。設衛星作業小車由C點移動距離x后到達點C’,C點正矢設為H1,C’的正矢設為*****,B點的正矢為H2,D點的方向偏移距離為FD。圖1中的“1”表示正確的圓曲線位置; “2”表示有方向偏差的圓曲線;“3”表示整正后的圓曲線。
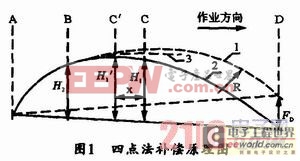
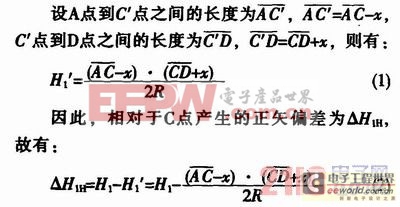
設由D點的方向偏移所產生的補償值為△H1F,C點產生的偏移誤差為FC,C’的偏移誤差為![]() ,那么,根據相似三角形的比例關系可知
,那么,根據相似三角形的比例關系可知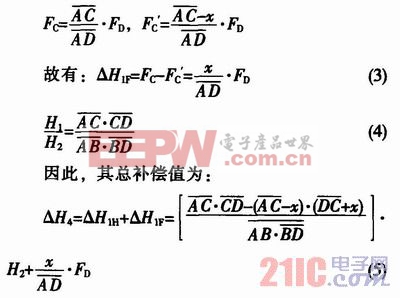












評論