基于LM3S615單片機的自動測高測距小車的研究與設計

2 系統設計
1)總體設計方案 通過以上分析,可將系統分為5部分:角度檢測模塊、水平距離檢測模塊和遙控控制模塊、LCD液晶顯示模塊、信號處理以及控制模塊。系統框圖如圖2所示。
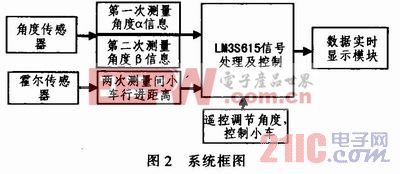
總體設計方案為LM3S615處理器通過角度傳感器,采集第1次角度傳感器測量信號并存儲,遙控控制小車并調節角度通過一段距離,采集第2次角度傳感器測量信號,同時利用霍爾傳感器對兩次測量間的小車行進距離進行測量,最終通過LM3S615處理器通過算法公式得出具體高度并送入LCD12864液晶顯示模塊進行顯示。
2)角度信號檢測方案設計 本設計采用巨磁電阻角度傳感器,它是利用巨磁電阻在一定的磁場下電阻值急劇減小這一特性開發的角度測量傳感器。它具有線性好、線性范圍寬、體積小、靈敏度高(分辨率可以達到12位,精度達到10位,最低分辨率為0.01度)、響應頻率高等一系列的優點。缺點是成本較高。
3)水平距離檢測方案設計 本設計采用霍爾傳感器計數的方法進行水平距離測量,它具有體積小、靈敏度高等優點,而且集成化的霍爾傳感器在感應到磁場變化時,會有一個數字量的高低電平跳變的特性,可以利用這個特性達到計數的目的。
4)控制器模塊設計 采用LM3S615ARM作為控制器,Luminary Micro StellarisTM系列的微控制器是首款基于ARMCortexTM-M3的控制器,它將高性能的32位計算引入到對價格敏感的嵌入式微控制器應用中。考慮到精度以及運行速度要求不太高等諸多因素,決定采用LM3S168ARM作為本設計的處理器模塊。
3 系統實現
本系統共包含電源、角度數據信號采集、距離數據信號采集、遙控控制、數據信號控制、數據信號顯示6個主要模塊。具體介紹如下。
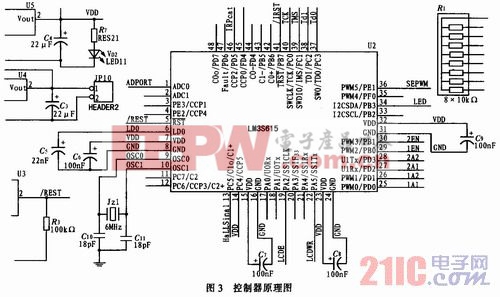
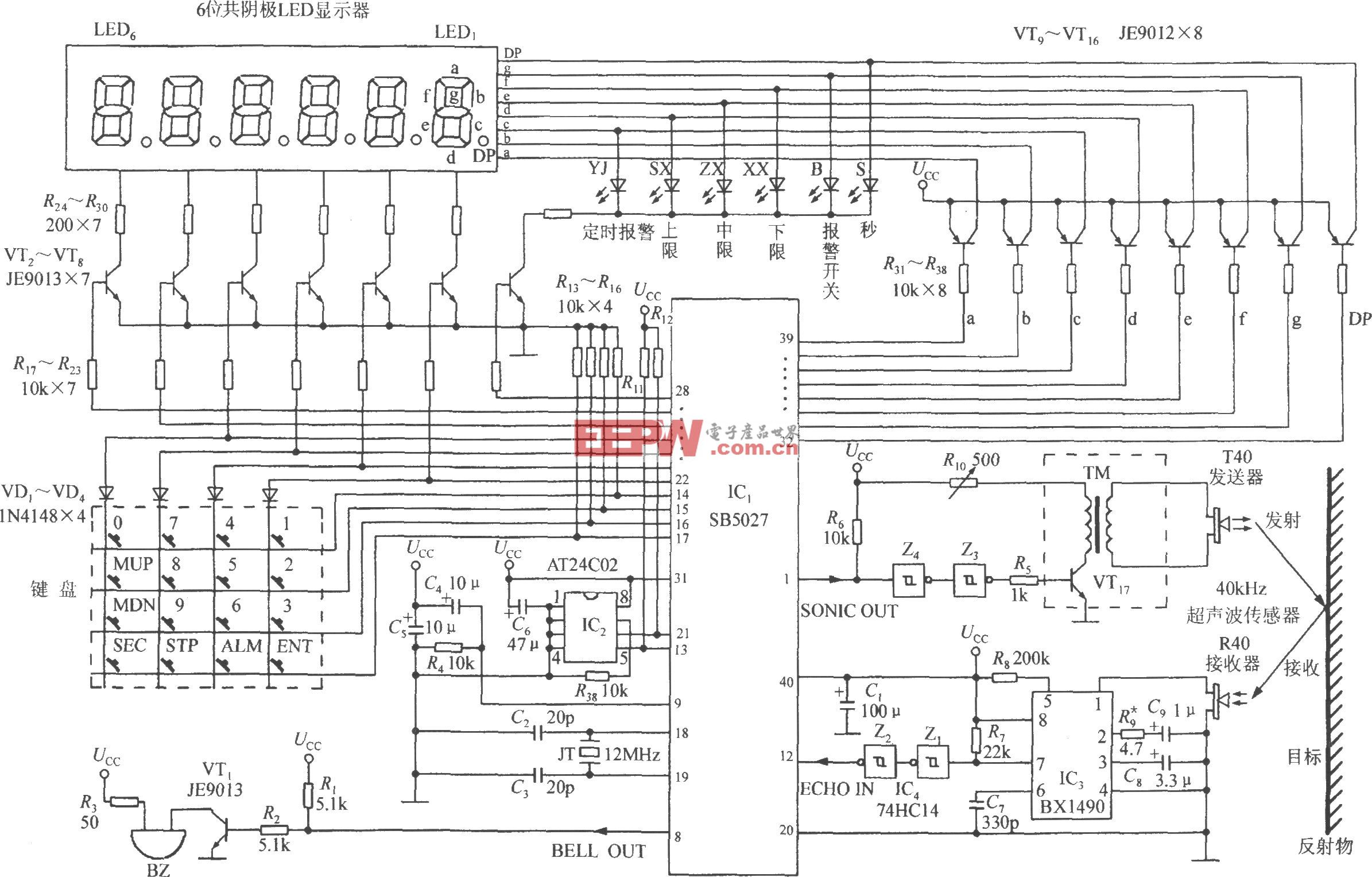
1)控制部分電路設計 控制部分必須完成紅外控制部分軟件解碼功能、電機運行控制功能、舵機控制功能、霍爾傳感器計數功能、激光器控制、角度傳感器數據采集功能以及LCD控制。控制部分電路如下圖3所示。






評論