基于51單片機(jī)的超聲波倒車?yán)走_(dá)系統(tǒng)的設(shè)計

3 軟件設(shè)計
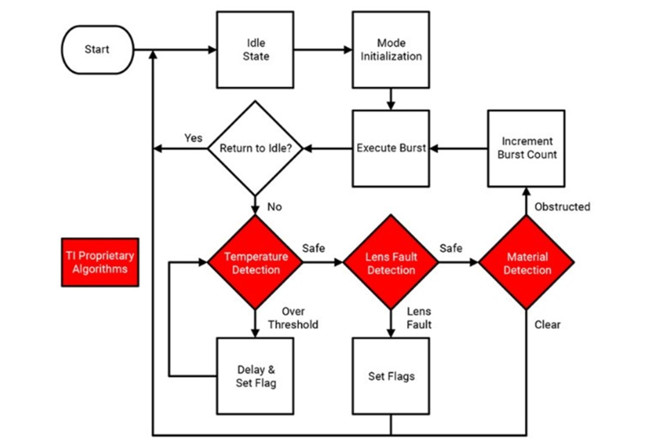
本系統(tǒng)的軟件設(shè)計采用模塊化設(shè)計,由主程序、超聲波發(fā)射子程序、超聲波接收子程序、溫度補(bǔ)償子程序、報警子程序以及顯示子程序組成。主程序流程圖如圖6所示。
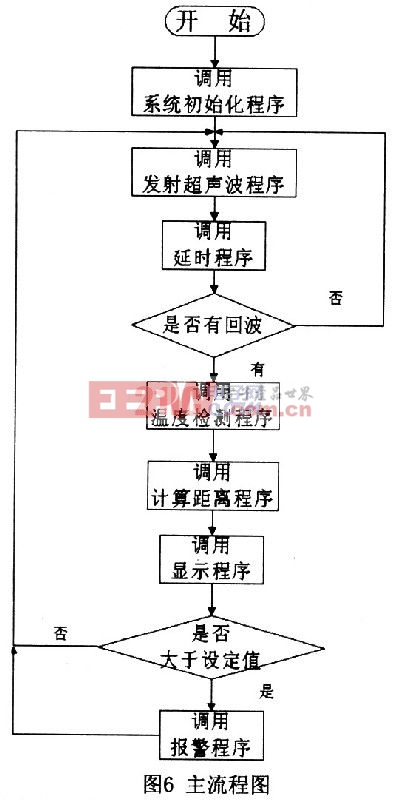
超聲波倒車?yán)走_(dá)系統(tǒng),最重要的就是對發(fā)射信號的控制及接收測量的時機(jī)控制。在設(shè)計中,AT89S52對發(fā)射的控制就是對40kHz方波產(chǎn)生電路的控制。由AT89S52的Pl.0口控制超聲波發(fā)射電路以6個脈沖的序列發(fā)射出去,在程序中用延時實現(xiàn)。脈沖發(fā)射同時打開定時器T0開始計時,發(fā)射后等待1ms打開外部中斷INT0,等待回波反射到接收探頭。等待1ms的原因是,超聲波發(fā)射探頭發(fā)射的超聲波一般都會存在余波干擾,有部分聲波會直接傳到接收探頭,經(jīng)接收電路放大后,系統(tǒng)就會把它誤認(rèn)為是檢測的回波信號,發(fā)射后等待1ms可以避免檢測到余波信號,當(dāng)然這也會導(dǎo)致測量盲區(qū)的存在。
4 結(jié)論
為了證明本文設(shè)計的倒車?yán)走_(dá)系統(tǒng)的可靠性,在內(nèi)部進(jìn)行了實地測量。本系統(tǒng)測距范圍為0.2~5m。最大誤差小于3cm。因此,本系統(tǒng)具有工作穩(wěn)定、抗干擾能力強(qiáng)、靈敏度高的特點。
溫濕度控制器相關(guān)文章:溫濕度控制器原理









評論