基于51單片機的交流伺服電機轉速控制系統研究

3.1 按鍵預置子程序
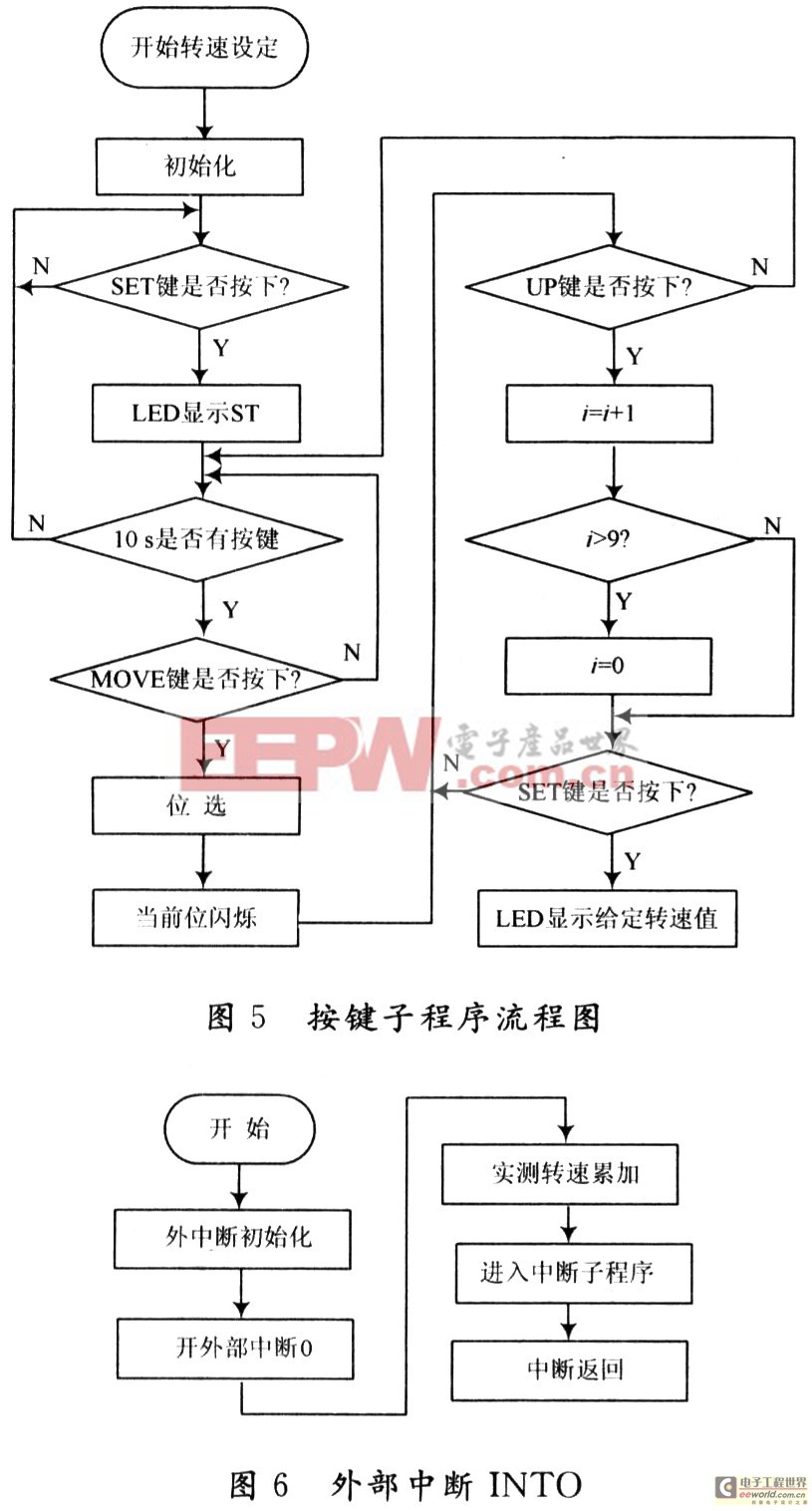
面板上有3個鍵與該子程序相關,它們是SET,MOVE和UP,其功能分別是:SET用來確定設定位,共有4位,包括個位、十位、百位和千位;MOVE用來選擇那一位;UP控制被控位的增加,每次增加,在0~9之間循環。當用戶確定其輸入時可按鍵SET,程序便根據輸入的值確定伺服電機工作時的給定轉速,最后,將設定值存人對應的變量中,按鍵子程序流程如圖5所示。
3.2 定時中斷服務子程序
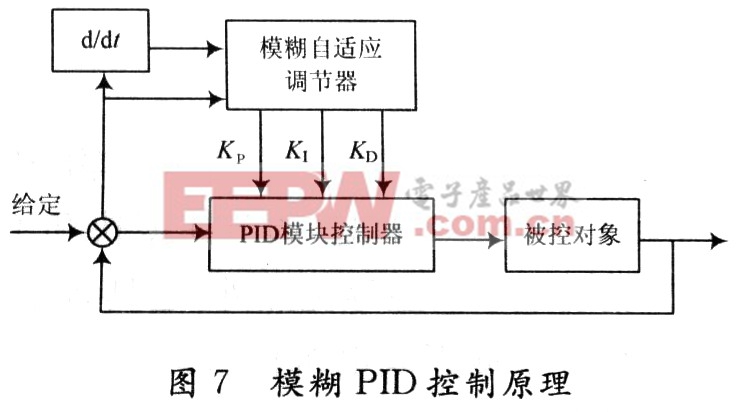
電機每轉動1圈,單片機就中斷1次。通過檢測兩次中斷的時間間隔,即通過定時器的計數,就可以算出電機轉速。為了實現轉速檢測需將轉速中斷配置為最高中斷優先級INTO。中斷計數的程序框圖如圖6所示。
3.3 轉速的PID控制算法
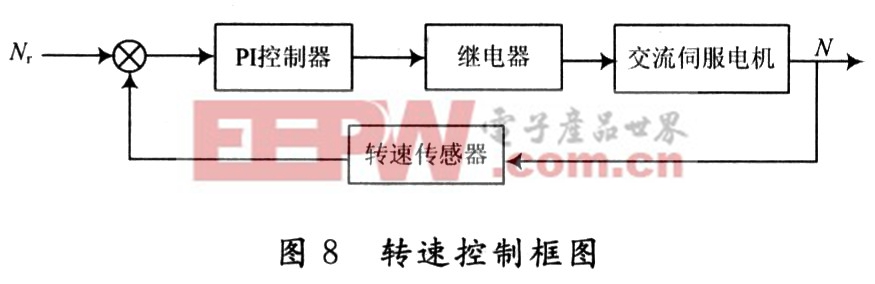
作為模糊控制和PID控制相結合的產物,模糊自適應PID控制除具有調速范圍寬,調節速度快和不要求掌握受控對象的精確數學模型等優點外,還具備結構簡單、容易實現的特點。根據直線電機位置運動規律,模糊自適應PID控制的基本思想是:當誤差大時,需加大誤差控制作用的權重,以快速消除誤差,提高系統響應速度;當誤差小時,需加大誤差變化量控制作用的權重,以避免超調使系統盡快進入穩態。根據上述規律,可設計模糊自適應PID控制系統的模糊推理規則表。表1給出KP的模糊調整規則實例。其中,e(k)和△e(k)分別為位置誤差及其變化量。模糊推理規則形式為:
![]()
模糊自適應PID控制的原理如圖7所示。
模糊PID的參數調整值為:

式中:j為規則條件語句的條數,j=1,2,…,n;ukxy(Cx)為各規則語句中Kx的隸屬度;Cx為參數x所取得的模糊子集模糊論域的中心值。
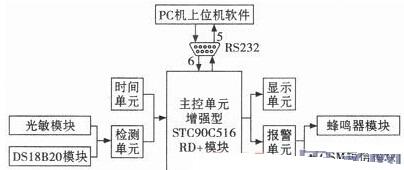
在實現了電機轉速的實時檢測之后,就可以采用閉環控制來調節電機的轉速。轉速的控制框圖如圖8所示。其計算如式(2)所示:![]()
式中:Nr為由按鍵設定的轉速;N為實際的轉速輸出值。PI控制器由STC89C52RC單片機通過編程實現實際轉速與設定轉速之間的控制偏差△N。
4 結 語
該系統研究以單片機作為控制器,對非標準交流伺服電機進行控制,有效利用單片機內部資源以及詳細了解相應電機運動控制系統的運行特性,在生產調速電機的配套裝置實際應用中,降低了系統的成本,提高了系統的性能。

伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理









評論