超聲波導(dǎo)盲器的設(shè)計

1 引言
盲人在獨(dú)自行走時主要依靠導(dǎo)盲裝置。最簡單常用的裝置是普通的手杖,用它在地面上敲擊,可幫助盲人發(fā)現(xiàn)0.5米以內(nèi)的障礙物。它的主要缺點(diǎn)是不能發(fā)現(xiàn)較遠(yuǎn)一點(diǎn)的障礙物以及空中突出的障礙物。例如,在相當(dāng)于頭部、胸的位置懸掛或突出的物體。另外,盲人還可以利用導(dǎo)盲犬帶路,但是不易訓(xùn)練且成本較高。為了更好的幫助盲人行走, 許多國家都研究和生產(chǎn)了各種電子導(dǎo)盲裝置,但大多成本較高,如各類導(dǎo)盲機(jī)器人及其它電子裝置。本文提出了一種用單片機(jī)開發(fā)的超聲波導(dǎo)盲裝置的設(shè)計方案,它具有低成本、實(shí)用和精確的特點(diǎn)。
2 導(dǎo)盲裝置的功能設(shè)計及系統(tǒng)組成
導(dǎo)盲裝置主要由超聲波探頭、單片機(jī)以及測控及處理電路、按鍵、蜂鳴器等組成,可以放在包中,或安裝在帽子上、手杖中。導(dǎo)盲裝置有三個按鈕,分別是電源開關(guān)、遠(yuǎn)距、近距控制按鈕,還有一個音量調(diào)節(jié)旋紐。該裝置使用電池,電源開關(guān)可控制系統(tǒng)通、斷電,不用的時候關(guān)掉電源,節(jié)省電能。使用時,超聲波探頭方向指向探測方向,當(dāng)前方有障礙物時,在一定距離內(nèi)喇叭會發(fā)出報警聲并隨著向障礙物的接近頻率逐漸升高,起到提示作用。遠(yuǎn)距、近距、控制按鈕可用來控制報警的距離,通電時初始報警距離為2米,按遠(yuǎn)距控制按鈕可將初始報警距離設(shè)為5米,按近距控制按鈕可將初始報警距離設(shè)為1米,報警聲音音量可用音量調(diào)節(jié)旋紐調(diào)節(jié),有耳機(jī)插孔,可以接耳機(jī)。
該裝置是以AT89C51單片機(jī)作為控制器,利用超聲波回聲測距的原理測距,用蜂鳴器進(jìn)行聲音報警。系統(tǒng)的硬件結(jié)構(gòu)框圖如圖1所示。該系統(tǒng)主要由單片機(jī)控制系統(tǒng)、超聲波發(fā)射電路、接收放大電路、按鍵控制和聲音報警電路。AT89C51單片機(jī)是整個系統(tǒng)的核心部件,用來控制、協(xié)調(diào)各部件的工作。工作時先由單片機(jī)控制的振蕩源產(chǎn)生40K Hz頻率的信號以驅(qū)動超聲波傳感器,使它發(fā)射脈沖。當(dāng)?shù)谝粋€超聲波脈沖發(fā)射后,計數(shù)器開始計數(shù),在檢測到第一個回波脈沖的瞬間,計數(shù)器停止計數(shù),計算出從發(fā)射到接收的時間差Δt,最終利用單片機(jī)計算出距障礙物的距離,并根據(jù)遠(yuǎn)距、近距控制按鈕設(shè)定的測距值進(jìn)行報警指示。
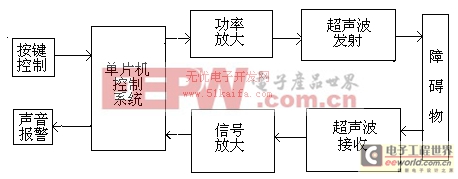
圖1超聲波導(dǎo)盲系統(tǒng)的硬件結(jié)構(gòu)框圖
3. 超聲波測距原理
超聲波測距采用的方法是時間差測距法,在超聲波發(fā)生器發(fā)射出超聲波的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時,測出發(fā)射和接收到回波的時間差Δt。由下式可以求出超聲波發(fā)射地與目標(biāo)之間的距離S
S=vΔt/2 (1)
式中v為超聲波的傳播速度,超聲波常溫下在空氣中的傳播速度是340米/秒,傳播速度與空氣的溫度、濕度等因素的有關(guān),這里由于測量距離不長,測量精度要求不高,不考慮其他影響,只要測得超聲波發(fā)射和接收回波的時間差Δt,按(1)式計算即可。
4 控制系統(tǒng)硬件電路設(shè)計
4.1 超聲波的發(fā)射電路
超聲波的發(fā)射電路主要由高頻三極管及超聲波發(fā)生器組成,如圖2所示,超聲波收發(fā)傳感器采用壓電陶瓷傳感器UCM40,由于頻率為40kHz左右的超聲波在空氣中傳播的效率最佳,因此通過執(zhí)行程序由單片機(jī)P1.0產(chǎn)生40KHz的振蕩信號,經(jīng)過高頻三極管放大, 驅(qū)動超聲波發(fā)生傳感器UCM40T發(fā)出40KHz的超聲波脈沖。
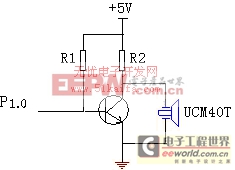
圖2 超聲波發(fā)射電路
4.2 超聲波的接收電路
超聲波的接收傳感器采用與發(fā)射傳感器配對的UCM40R,將由發(fā)射傳感器發(fā)出的經(jīng)反射后的超聲波脈沖轉(zhuǎn)變?yōu)槲⑷醯慕涣餍盘枺?jīng)過運(yùn)算放大器 LM358的兩級放大后,送至音頻譯碼集成模塊LM567的3腳。LM567是帶鎖相環(huán)的音頻譯碼器,具有選頻功能,LM567內(nèi)部的壓控振蕩器的中心頻率f=1/1.1RC,當(dāng)LM567輸入信號大于25mV時,輸出端8腳由高電平跳變?yōu)榈碗娖剑瑢⑵渥鳛閱纹瑱C(jī)的中斷請求信號,送至單片機(jī)INT0端,以啟動中斷服務(wù)子程序。接收電路如圖3所示。
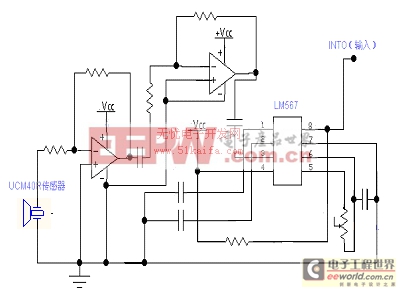
圖3超聲波接收電路
4.3按鍵及蜂鳴器驅(qū)動電路
開關(guān)控制電源的通斷,遠(yuǎn)距、近距控制按鈕一端接高電平,另一端分別接單片機(jī)P1.2、P1.3,并同時經(jīng)與門接入單片機(jī)INT1端,當(dāng)其中任意按鍵按下時會產(chǎn)生一個中斷請求信號送入INT1,同時,從P1口讀數(shù)判斷按鍵的狀態(tài)并調(diào)用相應(yīng)的子程序進(jìn)行處理。遠(yuǎn)距、近距控制按鈕同時只有一個有效,由軟件控制,都按下時為近距控制按鈕有效。蜂鳴器由三極管驅(qū)動,接P1.4,由報警程序控制,對應(yīng)不同的按鍵及距離,發(fā)出不同頻率的聲音。
5 系統(tǒng)的軟件設(shè)計
本系統(tǒng)軟件采用模塊化設(shè)計,超聲波測距導(dǎo)盲器的超聲波測距、按鍵控制、報警提示都由AT89C51單片機(jī)控制,主程序流程圖如圖4所示。
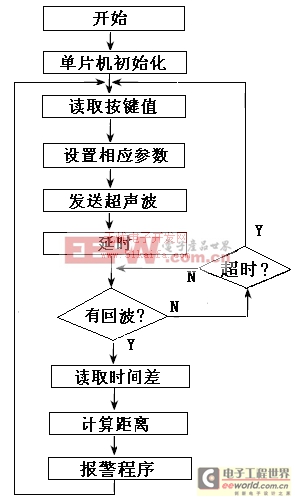
圖4 主程序流程圖
上電后主程序無限循環(huán),初始化后系統(tǒng)設(shè)置一系列初始值,包括超聲波發(fā)射間隔數(shù)、定時器定時初值、報警門限值等,然后讀取按鍵的狀態(tài),再根據(jù)按鍵狀態(tài)對初始設(shè)定值進(jìn)行修改,初始值報警距離設(shè)定為2米,即2米內(nèi)有障礙物時即驅(qū)動蜂鳴器發(fā)出聲音,并且隨著距離的接近,不斷調(diào)整參數(shù),使得聲音的頻率不斷提高。遠(yuǎn)距、近距控制按鈕分別對應(yīng)不同的超聲波發(fā)射間隔和報警門限、頻率等;程序控制發(fā)送0.2毫秒寬度的超聲波,同時啟動定時器T0計時;為避免接收傳感器直接接收到發(fā)射的超聲波,在發(fā)射超聲波之后插入一段延時,由于設(shè)置超聲波頻率為40KHz , 超聲波常溫下在空氣中的傳播速度是340米/秒,計算可知延時6個脈沖就可以了。延時后啟動接收回波程序,等待接收回波,超時(即在設(shè)定距離內(nèi)無障礙物) 即返回前面,若有回波則停止計時,讀取時間差,利用公式(1)計算出距離,然后執(zhí)行報警程序,根據(jù)計算距離結(jié)果及設(shè)定值比較選擇不同參數(shù),驅(qū)動蜂鳴器發(fā)出不同頻率的聲音,距離越近頻率越高。最后返回重新開始。
6 誤差分析
對系統(tǒng)進(jìn)行實(shí)驗(yàn)測試,結(jié)果發(fā)現(xiàn)在5米范圍內(nèi),最大誤差在5cm以內(nèi),且距離越近,誤差越小,完全滿足導(dǎo)盲的需要。分析誤差主要有幾個原因:一是空氣溫度變化等引起的聲速變化造成的誤差,由于超聲波在空氣中的傳播速度為V=331.5+0.607t,t為現(xiàn)場環(huán)境溫度,溫度在-30℃--40℃范圍變化時,傳播速度V的變化范圍為313米/秒--356米/秒,對利用公式(1)計算出的距離值有一定影響,采用聲速預(yù)置和傳播介質(zhì)溫度測量結(jié)合的方法對聲速進(jìn)行修正,可有效地降低溫度變化產(chǎn)生的誤差。二是發(fā)射與脈沖計數(shù)由于響應(yīng)快慢差異開啟不同步引起的誤差,對此在調(diào)試中通過脈沖計數(shù)值補(bǔ)償進(jìn)行修正。三是超聲波在傳播過程由于受衍射、散射和吸收等影響衰減導(dǎo)致的誤差,近距離誤差不明顯,距離越遠(yuǎn)產(chǎn)生的誤差越大,可適當(dāng)增大超聲波的發(fā)射功率等來改善。四是發(fā)射和接受前置電路延遲的時間誤差等,而發(fā)射前置電路和接收前置電路中采用集成芯片都有時間延遲,而計數(shù)器則一直是在工作,直到回波經(jīng)過LM567處理后變成負(fù)跳變電信號產(chǎn)生外部INTO中斷,在整個計數(shù)過程中,多了延遲時間中的計數(shù)次數(shù),導(dǎo)致測距數(shù)據(jù)的誤差。對此采取時間增益控制,來減少誤差,由于本裝置對于厘米級的精度已經(jīng)足夠,電路延遲都是納秒數(shù)量級,記數(shù)頻率是40KHz,所以減少一個記數(shù)單位完全可以矯正。針對誤差原因在程序設(shè)計及系統(tǒng)調(diào)試中做了相應(yīng)處理后,收到一定的效果,精度得到一定的提高。
7 結(jié)束語
由于考慮到體積、成本等因素,本裝置在性能上、功能上還存在不足,有待于進(jìn)一步提高:
(1)增加幾路不同方向的超聲波探測或紅外探測器以及溫度補(bǔ)償電路等,可以提高裝置的靈敏度和精度,同時提高可靠性。
(2)可在裝置中增加一個語音芯片,將蜂鳴報警改為語音說明指示,根據(jù)探測結(jié)果直接報出距離、方位,更便于使用。
(3)由于受發(fā)射功率及回波檢測靈敏度的限制,探測范圍較小,可增加發(fā)射功率調(diào)節(jié)等電路,以便增大探測范圍,可用于夜間探路、井下探索等。
本文創(chuàng)新點(diǎn):
(1)從測試結(jié)果分析可知,本裝置采用較低成本的器件設(shè)計制作,且誤差較小,完全滿足盲人行走的指引作用,具有較高的性價比。
(2)本裝置結(jié)構(gòu)簡單、體積小、性能穩(wěn)定,操作容易、使用方便,可以安裝在不同的載體上,制作成不同的用具,如手杖、導(dǎo)盲眼鏡、導(dǎo)盲背心等,盲人很容易學(xué)會使用,具有一定推廣應(yīng)用價值。
參考文獻(xiàn)
[1]何道清.傳感器與傳感器技術(shù)[M].科學(xué)出版社,2003.10
[2]趙 珂.時差法超聲測距儀的研制[J].國外電子元器件,2005.1
[3]何立民.MCS-51系列單片機(jī)應(yīng)用系統(tǒng)設(shè)計[M].北京航空航天大學(xué)出版社,1990
[4]路錦正.超聲波測距儀的設(shè)計[J].傳感器技術(shù),2002.8
[5]趙宏剛,黃席樾.基于AT89C2051的超聲波泊車防撞系統(tǒng)設(shè)計[J].自動化與儀器儀表,2005.4
[6]宋建國.AVR單片機(jī)原理及應(yīng)用[M].北京航空航天大學(xué)出版社,1998
[7]張健,李剛.超聲波系統(tǒng)的研究與設(shè)計[J].合肥工業(yè)大學(xué)學(xué)報,2004.6
[8]王俊英. 基于AT89S51單片機(jī)的PWM專用信號發(fā)生器的設(shè)計[J]。微計算機(jī)信息,2005,12-2,p102-104
蜂鳴器相關(guān)文章:蜂鳴器原理











評論