基于FPGA和單片機的位移測量裝置的設計

3.4 A/D采樣電路
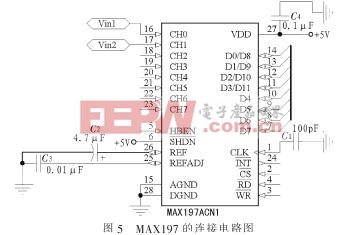
鐵芯在移動的過程中,輸出的電壓值變化范圍較大,因此,接入程控放大器,先通過A/D轉換器采樣,按照事先劃分的幅度帶對待處理信號進行幅度定位,然后控制放大器的檔位,以提高A/D轉換器的采樣精度,從而減小測量誤差。MAXl97采用的是內部時鐘和內部基準源,幾乎不需要外圍電路,電路結構簡單,應用方便。具體電路圖如圖5所示。
3.5 直流電機驅動電路
采用專用芯片L298HN作為電機驅動。電機起動時需要較大的電流,為了保證電機起動時對單片機控制板的供電系統不至于產生影響而產生掉電現象,需要采用光電耦合器TLP521-2GB進行電源隔離,同時應注意需要對L298HN的供電電壓進行去耦,以保證驅動電路的工作穩定。電機驅動電路如圖6所示。











評論