基于ARM和CAN總線的嵌入式PLC設計

2 系統硬件設計
2.1 開關量輸入輸出模塊
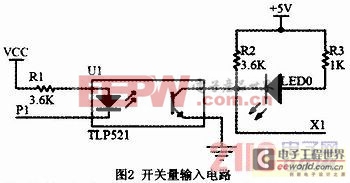
開關量輸入電路的功能是接收工業現場各種開關量信號的輸入,并將其轉換成符合CPU要求的標準邏輯電平。為提高控制器的抗干擾能力,在開關量輸入信號和處理器STM32之間使用光電耦器件TLP521隔離,當開關量輸入信號受到干擾時,只要其共模電壓低于光耦的最大隔離電壓,就不會對處理器正常工作造成任何影響。
開關量輸入電路如圖2所示。其中X1為輸入端,P1為微控制器端口,LED0為輸入點的狀態指示燈,TLP521為光電耦合器,它實現現場與PLC的CPU電氣隔離,提高抗干擾性。
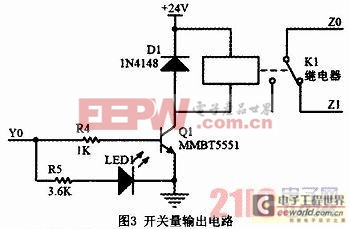
開關量輸出電路是嵌入式PLC與外部連接的輸出通道,PLC通過它向外部現場執行部件輸出相應的控制信號。開關量輸出通常有晶體管輸出和繼電器輸出兩種形式。本設計中,開關量輸出電路采用了13路繼電器輸出,器件選用松樂SRD-24VDC-SL-C,繼電器輸出電路可用于直流負載,也可用于交流負載,它特別適合于對動作時間和工作頻率要求不高的場合。其電路圖如圖3所示。D1為穩壓二極管1N4148,因為直流繼電器的線圈在斷開時會產生反向電動勢,這時需要在繼電器兩極并接一個1N4148來進行快速放電。
2.2 模擬量輸入模塊
模擬量輸入電路的主要功能是把現場測量到的模擬量信號轉變成PLC可以處理的數字量信號。A/D轉換器是模擬量輸入電路的主要器件,STM32微控制器內部含有8路10位A/D轉換器,配合信號調理電路以及相應的控制電路,可以完成模擬量的采樣和轉換。轉換后的數字量由CPU讀入PLC系統的輸入映像緩沖區,從而完成對模擬量的采集。
本設計中,模擬量輸入電路有8路4~20mA電流輸入。4~20mA直流信號制是國際電工委員會(IEC)制定的過程控制系統用模擬信號標準。在工業現場,如果采集的信號經調理后是電壓信號并且進行長線傳輸,會產生以下問題:第一,由于傳輸的信號是電壓信號,傳輸線會很容易受到噪聲的干擾;第二,傳輸線的分布電阻會產生電壓降。為了解決上述問題和避開相關噪聲的影響,工業現場大量采用電流來傳輸信號。
2.3 CAN總線接口電路
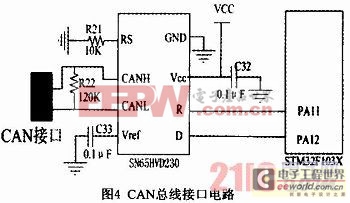
CAN總線是一種支持分布式實時控制的串行通信網絡,采用對通信數據進行編碼的方式,使得CAN總線上的節點數量理論上幾乎不受限制。然而實際上,CAN總線上的節點數量不宜超過100個。每一個嵌入式PLC通過CAN總線實現與上位機的通信,傳輸距離可達10km,通信速率高、可靠性高、抗干擾能力強。由于STM32F103X內部已集成CAN總線控制器,因此只需要外接CAN收發器即可,使得電路更加簡潔而且成本更低,同時可靠性得以提高。CAN收發器采用TI公司的SN65HVD230供電電壓為3.3V的CAN總線收發器,該收發器采用差分收發方式,最高速率可達1Mb/s,具有高抗電磁干擾、CAN總線保護、斜率控制等特點,電氣連接簡單,使用方便,完全滿足工業級產品的技術要求。通信接口電路如圖4所示。
3 系統軟件設計
由于嵌入式PLC在工業控制方面的實時性和穩定性要求,選用μC/OS-II操作系統來管理任務調度。μC/OS-II是一個專為嵌入式應用設計,基于優先級調度的搶占式實時操作系統內核,它包含了任務調度、任務管理、時間管理、任務間通信與同步等功能。各任務之間通過信號量、郵箱和消息隊列實現相互間的數據交換和同步。










評論