基于AT91RM9200的圖像采集系統(tǒng)設計

(3) V4L簡介與攝像頭驅動程序開發(fā)
Video for Linux(簡V4L)是Linux中關于視頻設備的內核驅動,它為編寫視頻應用程序提供一系列接口函數,內核、驅動程序和應用程序以它為標準進行交流,因此視頻類驅動程序的開發(fā)必須遵循此標準,應用V4L API函數進行設計[4]。
設備驅動程序是Linux內核與應用程序之間的接口,通過USB客戶驅動程序提供的USBD接口和應用程序接口,屏蔽了硬件實現(xiàn)的細節(jié)。應用程序將外部設備看成是一類特殊文件__設備文件,可以使用像操作普通文件一樣的系統(tǒng)調用接口函數來完成對外部設備的打開、關閉、讀寫和I/O控制操作。陷于篇幅原因只對驅動程序的重要部分進行闡述。
驅動程序的注冊、注銷:所有的USB設備類驅動程序都要在USBD中進行注冊和注銷,Linux中的驅動程序通常采用模塊方式編寫,使用函數module_init注冊設備,使用函數module_ exit注銷設備。
module_init(usb_gfkd_init); /*加載模塊入口,調用函數usb_register()注冊設備*/
module_exit(usb_gfkd_exit); /*注銷模塊入口,調用函數usb_deregister()注銷設備*/
驅動程序與USBD的接口:USBD為每個設備驅動程序維護一個相關的 usb_driver的數據結構,負責設備的初始化和卸載。當總線上有設備連接操作時,USBD通過該結構來查找相關的驅動程序,并調用初始化函數 probe()對設備初始化;當設備斷開時,USBD也通過該結構來查找相關的驅動程序,并調用設備卸載函數disconnect ()對設備卸載。USBD接口的數據結構定義為:
static struct usb_driver gfkd_driver = { "gfkd",gfkd_probe,gfkd_disconnect};
初始化函數static void * gfkd_probe(…)首先讀取設備的Usb dev結構,根據設備的配置描述符判斷該設備是否被驅動程序所支持, 判斷使用接口是否正確,然后為驅動申請一塊內存,再探測使用的攝像頭,完成對攝像頭的初始化,最后創(chuàng)建攝像頭的設備文件結點[5]。
卸載函數static void gfkd_disconnect (struct usb_device *dev, void *ptr)的作用是終止數據傳輸、刪除攝像頭的設備文件結點、釋放接口、將驅動占用的內存釋放。連接
驅動程序與應用程序接口:攝像頭驅動程序在static struct file_operations gfkd_fops中給應用程序提供了統(tǒng)一的外設操作函數接口,當應用程序對攝像頭進行open 、release、read、內存映射mmap以及IO控制等系統(tǒng)調用操作時將通過該結構訪問驅動程序提供的函數。
static struct file_operations gfkd_fops = {
.owner = THIS_MODULE, .open = gfkd_open,
.release = gfkd_close, .read = gfkd_read,
.mmap = gfkd_mmap, .ioctl = gfkd_ioctl,
.llseek = no_llseek, };
打開攝像頭函數static int gfkd_open(struct inode *inode, struct file *file)作用是打開攝像頭的設備文件結點,并為數據傳輸做好必要的準備工作。它先調用函數gfkd _alloc()分配用于視頻解碼的臨時數據緩沖區(qū)、幀緩沖區(qū)和數據緩沖區(qū);然后初始化攝像頭,用函數gfkd _setMode()設置輸出的視頻格式和分辨率;再用函數gfkd _setFrameDecoder()設置幀緩沖區(qū)接收的視頻幀的格式和分辨率;最后調用函數gfkd _init_isoc()初始化等時數據傳輸設置、打開攝像頭和分配提交URB。
關閉攝像頭函數static int gfkd_close(struct inode *inode, struct file *file)作用是關閉攝像頭的設備文件結點。它先調用函數gfkd _stop_isoc()終止等時數據傳輸;再調用函數CameraShutDown()關閉攝像頭;最后使用函數gfkd _dealloc()釋放分配的各種緩沖區(qū)。
內存映射函數static int gfkd_mmap(struct file *file, struct vm_area_struct *vma)實現(xiàn)內核空間與用戶空間的內存映射。先通過函數vmalloc()申請分配足夠大的內核態(tài)內存作為圖像幀緩沖區(qū),并能存儲兩個URB采集的圖像;然后用函數remap_page_range()將其映射到用戶空間中。這樣提高了用戶程序獲取內核態(tài)圖像幀緩沖區(qū)數據的速度。
讀函數static long gfkd_read(struct video_device *dev, char *buf, unsigned long count, int noblock)通過調用函數copy_to_user()將圖像數據從內核態(tài)的幀緩沖區(qū)拷貝到用戶態(tài)的數據緩沖區(qū)。
IO控制函數static int gfkd_ioctl(struct video_device *vdev, unsigned int cmd, void *arg)的功能是接收應用程序的各種命令,實現(xiàn)對攝像頭的控制操作,如獲得攝像頭的參數、設置攝像頭的分辨率、開始采集圖圖像和設置幀同步。
由于Linux中任何USB傳輸都是通過URB實現(xiàn)的,每次URB傳輸都包括URB的建立、發(fā)出、回收、數據整理等階段不產生有效數據,因此在具體實現(xiàn)中采用等時傳輸方式,通過建立兩個URB,使用雙URB輪流通信的方法來提高圖像的采集速度。
本驅動程序開發(fā)是基于ATMEL最新版Linux-2.4.27-vrs1-Atmel,在驅動程序開發(fā)完后需重新配置內核,讓內核支持usb- ohci 和video for linux,再把驅動程序配置成module,然后重新編譯內核生成.o文件。將編譯好的驅動放入文件系統(tǒng),建立設備文件,然后將文件系統(tǒng)燒入 flash,再連接USB攝像頭(如內置中芯微Zc301P DSP),把模塊加載進內核并注冊就可以找到該攝像頭并顯示:
gfkd _core.c: USB gfkd camera found. Type Vimicro Zc301P 0x301b
gfkd _core.c: gfkd driver 00.57.06LE registered
(4) 圖像采集的實現(xiàn)與性能分析
服務端應用程序的實現(xiàn)是基于C/S模式,使用了3個線程,其中一個主線程,一個圖像采集線程負責從驅動程序獲取圖像,可根據變量grabMethod選擇采用read方式或內存映射方式獲取圖像;另有一個圖像發(fā)送線程負責圖像發(fā)送,程序通過建立帶共享鎖的4幀圖像循環(huán)隊列做為圖像采集線程和圖像發(fā)送線程進行數據交換的公共緩沖區(qū)。服務端還使用了兩個socket,一個用于和服務端口綁定后偵聽是否有服務請求,另外一個用于發(fā)送圖像數據,主線程流程如圖3所示。
程序首先設置采集圖像的相關參數(如設備號、圖像大小、初始化圖像幀緩沖區(qū)等),然后通過函數 int init_videoIn()獲取攝像頭參數,設置采集圖像寬度、高度、格式、采集方式等參數,并分配4幀采集圖像緩存 vd->ptframe[i] =(unsigned char *) realloc (vd->ptframe[i], sizeof(struct frame_t) + (size_t) vd->framesizeIn ),再啟動圖像采集線程 pthread_create (w1, NULL, (void *) grab, NULL)進行圖像采集;創(chuàng)建服務端socket,與服務端口綁定后偵聽服務請求;如果有新連接進來,函數accept()返回一個新的發(fā)送 socket,并啟動新的圖像發(fā)送線程,pthread_create(server_th, NULL, (void *)service, new_sock); 如果采集結束或連接產生錯誤,調用pthread_join (w1, NULL)和close(serv_sock)關閉圖像采集線程和圖像發(fā)送線程,釋放有關資源后退出。
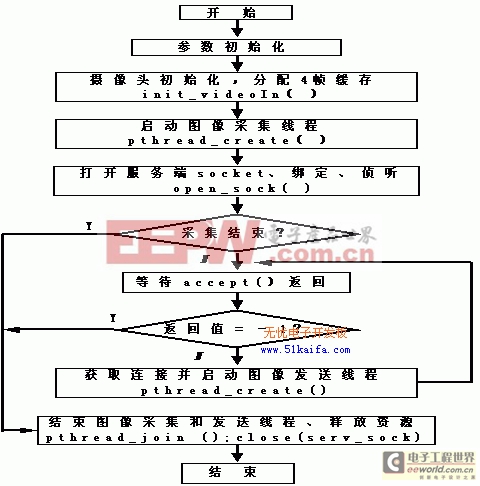
圖3.主程序流程









評論