基于單片機的智能泊車系統設計方案

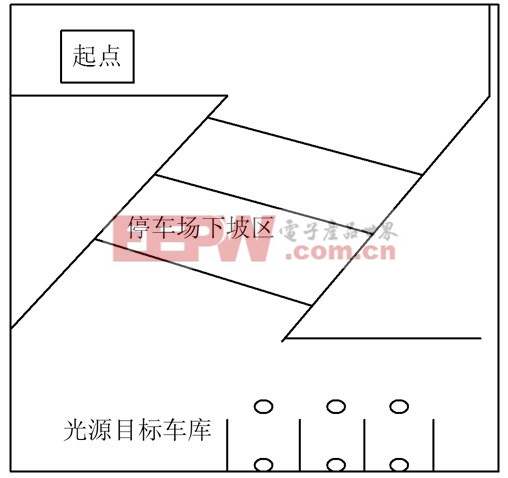
圖2 停車場系統設計圖
2 軟件設計
系統軟件設計在Keil C51 集成開發環境下進行。軟件主要包括系統主程序、避障子程序、光源引導子程序和測速限速子程序等。泊車系統整體流程如圖3所示,避障程序流程圖、光源引導程序流程圖分別如圖4,圖5所示。測速限速電路軟件設計思路是將每圈的時間換算成速度,再與設定的速度比較,如果所測速度大于設定值,則控制電機減速到設定值;如果所測速度小于設定值,則控制電機加速到設定值,完成小車的智能限速。
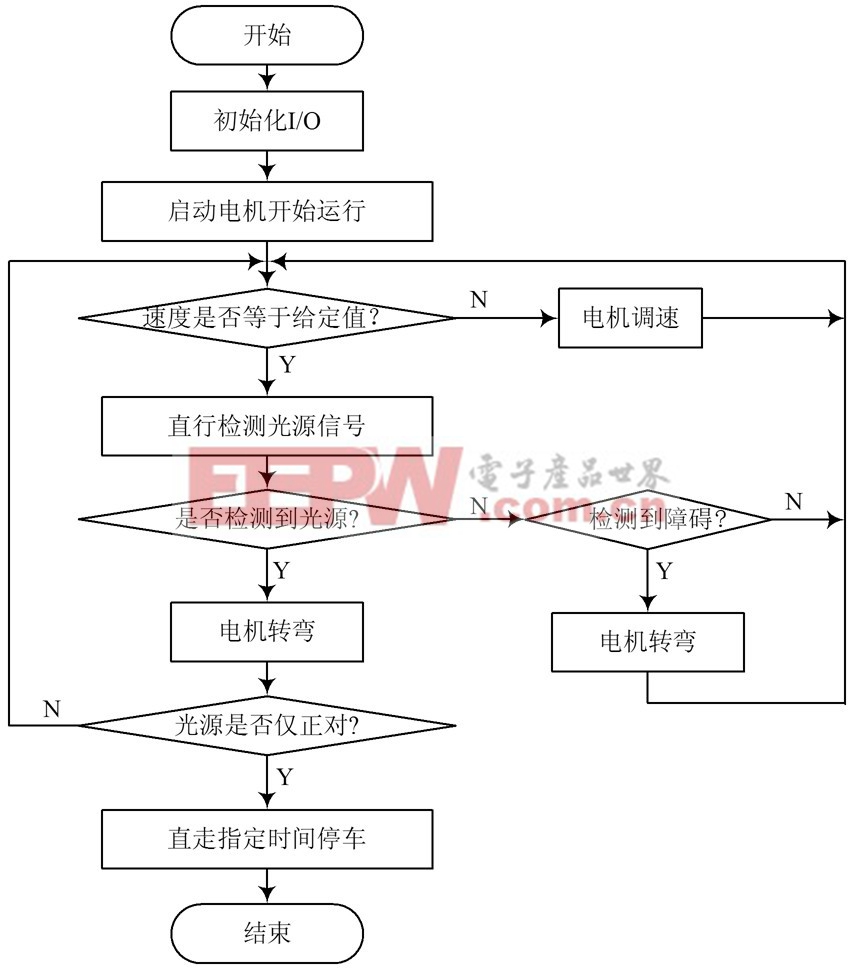
圖3 智能泊車系統總體流程圖
3 各模塊測試及連接
各模塊連接:小車舵機左轉輸入端接P3.4;小車舵機右轉輸入端接P3.5;小車驅動電機前進輸入端接P3.6;小車驅動電機后退輸入端接P3.7;光電避障模塊左傳感器輸出端接P1.0;光電避障模塊右傳感器輸出端接P1.1;光源引導模塊左傳感器輸出端接P1.2;光源引導模塊中間傳感器輸出端接P1.3;光源引導模塊右傳感器輸出端接P1.4。
小車整體測試:把小車放在停車場入口處,打開小車電源,打開車庫中對應車庫位置的光源電源,小車避開障礙通過停車場下坡區,到達指定車庫前面,依靠光源引導入庫,停車。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理










評論