步進電機原理及使用說明

一、前言
步進電機是將電脈沖信號轉變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
雖然步進電機已被廣泛地應用,但步進電機并不能象普通的直流電機,交流電機在常規(guī)下使用。它必須由雙環(huán)形脈沖信號、功率驅動電路等組成控制系統(tǒng)方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業(yè)知識。
目前,生產(chǎn)步進電機的廠家的確不少,但具有專業(yè)技術人員,能夠自行開發(fā),研制的廠家卻非常少,大部分的廠家只一、二十人,連最基本的設備都沒有。僅僅處于一種盲目的仿制階段。這就給用戶在產(chǎn)品選型、使用中造成許多麻煩。簽于上述情況,我們決定以廣泛的感應子式步進電機為例。敘述其基本工作原理。望能對廣大用戶在選型、使用、及整機改進時有所幫助。
二、感應子式步進電機工作原理
(一)反應式步進電機原理
由于反應式步進電機工作原理比較簡單。下面先敘述三相反應式步進電機原理。
1、結構:
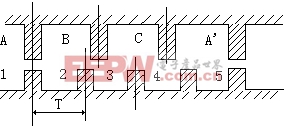
電機轉子均勻分布著很多小齒,定子齒有三個勵磁繞阻,其幾何軸線依次分別與轉子齒軸線錯開。
0、1/3て、2/3て,(相鄰兩轉子齒軸線間的距離為齒距以て表示),即A與齒1相對齊,B與齒2向右錯開1/3て,C與齒3向右錯開2/3て,A'與齒5相對齊,(A'就是A,齒5就是齒1)下面是定轉子的展開圖:
2、旋轉:
如A相通電,B,C相不通電時,由于磁場作用,齒1與A對齊,(轉子不受任何力以下均同)。
如B相通電,A,C相不通電時,齒2應與B對齊,此時轉子向右移過1/3て,此時齒3與C偏移為1/3て,齒4與A偏移(て-1/3て)=2/3て。
如C相通電,A,B相不通電,齒3應與C對齊,此時轉子又向右移過1/3て,此時齒4與A偏移為1/3て對齊。
如A相通電,B,C相不通電,齒4與A對齊,轉子又向右移過1/3て
這樣經(jīng)過A、B、C、A分別通電狀態(tài),齒4(即齒1前一齒)移到A相,電機轉子向右轉過一個齒距,如果不斷地按A,B,C,A……通電,電機就每步(每脈沖)1/3て,向右旋轉。如按A,C,B,A……通電,電機就反轉。
由此可見:電機的位置和速度由導電次數(shù)(脈沖數(shù))和頻率成一一對應關系。而方向由導電順序決定。
不過,出于對力矩、平穩(wěn)、噪音及減少角度等方面考慮。往往采用A-AB-B-BC-C-CA-A這種導電狀態(tài),這樣將原來每步1/3て改變?yōu)?/6て。甚至于通過二相電流不同的組合,使其1/3て變?yōu)?/12て,1/24て,這就是電機細分驅動的基本理論依據(jù)。
不難推出:電機定子上有m相勵磁繞阻,其軸線分別與轉子齒軸線偏移1/m,2/m……(m-1)/m,1。并且導電按一定的相序電機就能正反轉被控制——這是步進電機旋轉的物理條件。只要符合這一條件我們理論上可以制造任何相的步進電機,出于成本等多方面考慮,市場上一般以二、三、四、五相為多。
電子負載相關文章:電子負載原理 脈沖點火器相關文章:脈沖點火器原理




評論