基于STC89C52單片機的體操機器人系統設計

1 引言
模仿人的形態和行為而設計制造的機器人可稱為仿人型機器人,一般分別或同時具有與人類似的四肢和頭部。仿人機器人研究集機械、電子、計算機、材料、傳感器、控制技術等多門科學于一體,代表著一個國家的高科技發展水平。因此,世界發達國家都不惜投入巨資進行開發研究。體操機器人具有明顯的類人特征,具有可獨立運行的雙臂和雙腿,其中手臂部分具有不少于3個自由度,雙腿部分具有不少于2個自由度。可實現雙手俯臥撐,倒立劈叉,左、右單手俯臥撐,左、右側滾翻360°,前、后滾翻360°等較為復雜的體操動作,是研究仿人形機器人技術的基礎。
2 體操機器人的控制電路設計
本文設計的體操機器人控制部分主要采用STC89C52RC型單片機小系統作為控制核心,該型單片機是宏晶科技推出的新一代超強抗干擾/高速/低功耗的單片機,指令代碼完全兼容傳統8051單片機。其性能如下:
① 12時鐘/機器周期和6時鐘/機器周期任意選擇。
② 工作頻率范圍:0-40MHz,實際工作頻率可達48MHz。
③ 工作電壓:5V-3.4V(5V單片機)/3.8-2.0V(3V單片機)。
④ 片上集成1280字節/512字節RAM。
⑤ 通用I/O口(32/36個)。P0口是開漏輸出,作為總線擴展用時,不用加上拉電阻,作為I/O口時,需要加上拉電阻。
⑥ ISP(在系統可編程)/IAP(在應用可編程),無需專用編程器/仿真器,可通過串口(P3.0/P3.1)直接下載用戶程序。
⑦ 工作溫度:0-75℃/-40-+85℃。⑧ 封裝:PDIP-40,PLCC-44、PQFP-44。
體操機器人控制小系統的PCB板設計圖如圖1所示:
該體操機器人的關節驅動電機使用的是輝盛MG996通用型舵機。MG996型舵機是輝盛最新大扭力標準金屬齒舵機。速度,拉力和精確度都有相應提高,是目前市場上性價比最高的大扭力通用型舵機之一。其性能如下:
① 產品凈重:55g。
② 產品尺寸:40.7×19.7×42.9mm。
③ 產品拉力:10.5kg/cm(4.8V),13kg/cm(6V)。
④ 反應速度:0.20sec/60degree(4.8v),0.17sec/60degree(6.0v)。
⑤ 工作電壓:4.8-7.2V。
⑥ 工作溫度:0℃-55℃。
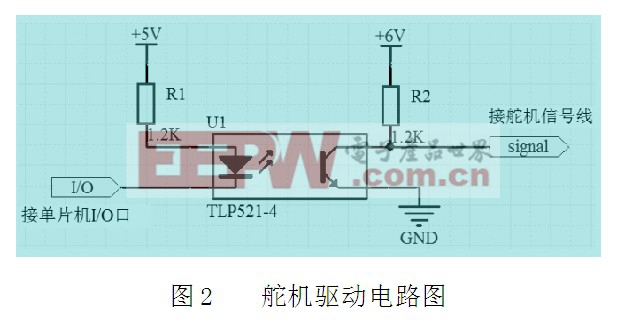
其MG996型舵機的驅動方式也是采用PWM方式,因此在考慮驅動電壓為6V時,輸出扭力最大的使用條件,設計了采用TLP521型光電耦合器的驅動電壓放大電路,其電路如圖2所示:












評論