基于ARM11+CPLD的小型無人機飛行控制器設計

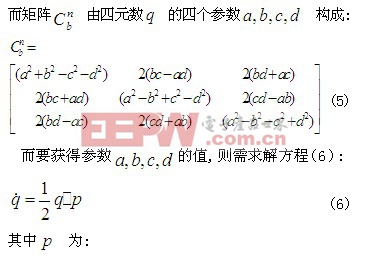
載體坐標系中的矢量
基于姿態數據及各軸角速率,PID控制器的輸出由(11)式計算[6][7]:

K為采樣序號、
4 系統測試
基于上述設計方案研制的飛行控制器主板如圖7所示,安裝于測試飛機如圖9所示。

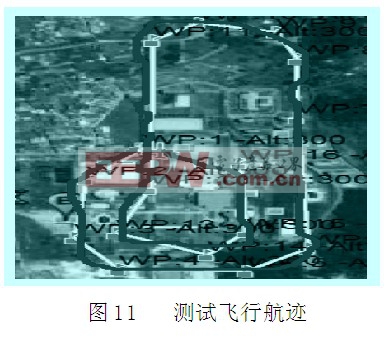
本文在某校園區進行多次飛行測試,飛行的航線如圖9所示,航線由16個航點構成,航點高度都為300米,航線總長度為8.57公里。無飛機的實際飛行航跡如圖9中藍色線條所示,本次測試從進入航線開始到航線結束共自主飛行了18分鐘,姿態穩定,最大偏航距≤15米。

試飛測試的任務載荷為航拍相機,CPLD每4秒輸出一拍照脈沖,航拍圖片如12所示。

5 結束語
本文闡述基于ARM11+CPLD飛行控制器的構建, ARM11的高速處理能力,使得系統的實時性高,系統飛行更加穩定,且接口豐富,利于功能擴展;CPLD在飛控系統中一方面起到擴充MCU IO口的作用,另一方面提高了系統的實時性。在此飛控主板上,本文實現了導航、姿態、任務等功能模塊,飛行測試結果理想。
參考文獻:
[1] 徐田來,崔平遠,崔祜濤.基于置信度加權的組合導航數據融合算法[J].航空學報,2007,28(6):1389-1394.
[2] Ick-Ho Whang,Won-Sang Ra.Simple Altitude Estimator using Air-Data and GPS Measurements[C].Proceedings of the 17th World Congress of the International Federation of Automatic ControlSeoul,Korea,ION,2008:4060-4065.
[3] 陳龍勝,姜長生.基于干擾觀測器的無人機著陸飛行逆控制器設計[J].電光與控制,2009,16(9):52-56.
[4] SAMSUNG Company.S3C6410 HW Design Guide V1.0 [EB/OL].[2011-08-10]. http://www.samsung.com
[5] Analog Devices.ADIS16365 MANUAL [EB/OL]. [2011-08-10].http://www.analog.com
[6] Bryson.A.E.Jr.,Control of Spacecraft and Aircraft[M].Princeton,NJ:Princeton University Press,1994.
[7]ROBERT C.NELSON 顧均曉(譯).飛行穩定性和自動控制[M].北京:國防工業出版社,2007.
[8] 韓守謙,裴海龍,王清陽.基于Xenomai的實時嵌入式Linux操作系統的構建[J].計算機工程與設計,2011,(1):96-98
[9] 俞永昌.設備驅動開發技術及應用[M].北京:人民郵電出版社,2010.

pid控制器相關文章:pid控制器原理








評論