基于ARM9與WinCE的GPS定位信息采集系統

因為繪制的是二維圖形,故只能將半球坐標系壓縮到觀測者所在的平面內(稱這個面為基礎面),圖上所表示出的衛星的位置實際為衛星在該平面的投影點,該坐標系的參數有2個,一個是表達衛星的投影點和觀測者的方位關系的方位角;另一個是表達衛星真實所在位置以基礎面為準與觀測者所構成的仰角關系的仰角。有了這2個參數就能在該坐標系中唯一確定一個具有物理意義的點。本系統設計中,設計簡單的坐標系,它有2個同心圓和4條直線組成。繪制出衛星視圖之前進行的簡單的坐標變換算法思想為:將衛星實際的方位角、仰角立體坐標轉換為平面內的橫縱(PX、PY)坐標,具體表示如式(2)所示。其中,(POX,POY)分別為兩同心圓原點(看作是觀測點)在LCD上的像素坐標,而T為對話框窗體客戶區長度的1/4。
3.5 串口接收的實現
完成GPS定位信息的采集,需要實現的串口主要的API函數包括:
1)打開串口函數。原型為Open(LPT OpenPort(LPCTSTRPort,int BaudRate,int DataBits,int StopBits,int Parity)。其中,Port代表串口名,如COMl等,BaudRate為波特率,DataBits為數據位;StopBits為停止位,Parity為奇偶校驗。
2)關閉串口函數。該函數在程序操作串口發生錯誤時使用,用于關閉該串口。實現的主要方法是:先判斷串口操作句柄hComm的值是否為INVALID_HANDLE_VALUE,如果是,則調用SetCommMask(),將上述代碼段中的EV_RXCHAR改為0,然后清除緩沖區,再利用CloseHandle函數關閉串行口操作句柄。
3)添加打開串口單擊事件代碼,通過創建一個串口接收線程和顯示線程來實現。
4)串口接收線程CommRecvTread()與回調函數OnCommRecv()。串口接收線程為一個無限循環,它不斷查詢串口接收線程退出事件m_Exit-ThreadEvent。如果退出事件有效,則該循環結束退出。如果調用讀串口函數查詢得知接收到數據,則調用串口接收成功回調函數0nCommRecv()。
4 實驗數據及分析
設置好串口參數后,打開串口COMl,既可獲取實驗數據。圖7為在某型軍車上一次實測的數據。實測數據界面拍攝的時間為2009年11月10日晚上9點45分,地點為某訓練場。數據在靜止的狀態下測得。該定位顯示的數據包括“原始數據”和解析后“經緯度、時間、海拔”等信息。通過分析圖7(a)界面的數據發現,$GPGSV語句有兩條,而在“星數”對應的Edit框中顯示的定位所用衛星數為8,由于每一條GPGSV最多能顯示4顆衛星的信息,故$GPGSV語句為兩條。這說明星數與$GPGSV語句數是吻合的。而獲取有效的GPS定位信息,至少需要4顆定位衛星。這也說明此次數據是有效的定位數據。
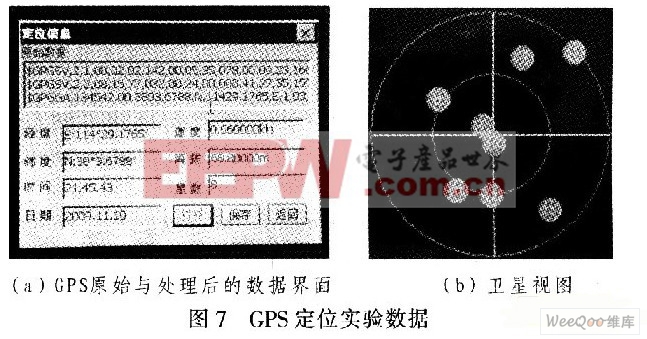
該界面顯示的經緯度信息分別為N:38°3.6788’,E:114°29.1765’;其中,N代表北緯,E代表東經。而用GoolgeEarth軟件查閱數據可知,石家莊軍械學院南門的精確經度/緯度信息為:北緯38°3.1650’,東經114°29.0046’,軍械學院西門的精確經度/緯度信息為:北緯38°3.394O’,東經114°28.5432’。通過與二者的經緯度信息比對發現,界面實時顯示的精度和緯度信息非常精確。通過實時比對標準的北京時間,說明時間和日期信息顯示也完全正確。
速度信息在靜止情況下測得,故理想的速度為0 k/s。而實際測得數據分別為0.060 00 k/s,前文已論述,1 k/s換算成標準的速度信息約0.514 444 m/s,故測得的速度誤差分別約為O.030 867 m/s。可以看出,測量的速度誤差相對而言是很小的。
界面顯示的海拔信息為:68.800 00 m。而通過石家莊市規劃局提供的資料可知:石家莊市區二環路內地勢西北高,海拔高度為81.5 m,東南低,海拔高度為64.3 m。測得的海拔高度還是存在微小的誤差。這可能跟接收的GPS信號的漂移有關。從圖7(b)部分的衛星視圖可以看出,衛星與觀測點的方位關系能清晰的表示,而且衛星的編號也能實時顯示,從上到下依次分別為:23、17、3、4、19、20、32、11。
5 結論
GPS定位為單點定位,用一臺接收機觀測衛星,獨立定出觀測點在WGS-84(地心坐標)中的絕對位置。系統以ARM9為嵌入式微處理器,以WindowsCE為嵌入式操作系統,通過串行口實現GPS接收機與ARM之間的通信,構建了某型軍車的GPS定位信息采集系統。實驗表明:該系統能實時顯示精度較高、持久有效的GPS定位數據,具有重要的實用價值和參考意義。=
參考文獻:
[1].ARM920Tdatasheethttp://www.dzsc.com/datasheet/ARM920T_139814.html.
[2].S3C2440datasheethttp://www.dzsc.com/datasheet/S3C2440_589562.html.
[3].HY57V561620datasheethttp://www.dzsc.com/_390336.html.
[4].RS232datasheethttp://www.dzsc.com/datasheet/RS232_585128.html.






評論