基于CPLD的服務機器人視覺系統(tǒng)軟硬件設計

2.2 閾值確定和色彩判斷
在確定閾值時,首先通過采集樣本進行訓練,從而得到預定的幾種顏色在YUV空間的分量的上下閾值,如圖2所示。
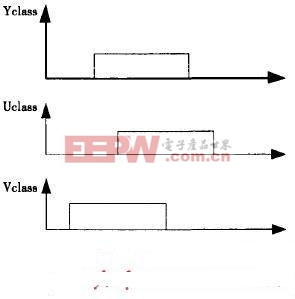
當一個待判定的像素在色彩空間中的位置落在這個長方體中時,就認為該像素屬于要找的顏色,從而完成對圖像顏色的識別。在Y空間中,Y值表示亮度,因它的變化很大,所以只考慮了U和V的值,在進行顏色判斷時,首先分別建立U、V的閾值向量。
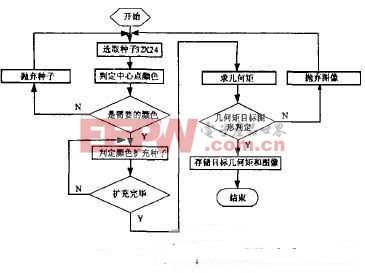
由于在系統(tǒng)中圖像傳感器的數字信號是8位,即1Byte,共255Byte,系統(tǒng)最多能判定8種顏色。在顏色識別后進行圖像分割,在圖像分割中采用了種子填充算法,其整個種子的填充是和像素點的顏色同時進行的,一開始不是對所有的像素進行處理,而是分塊進行的,本系統(tǒng)采用的塊是32×24像素,這樣計算量大大減小。當中心點是所要識別的顏色時,就以這個點為種子向四周擴散,并判定周圍像素點的顏色,直到填滿整個塊。在這過程中,同時對目標進行形狀識別。本系統(tǒng)采用了基于全局的特征向量的識別算法來進行識別。同時也為構建雅可比矩陣得到需要的矩特征量。圖3為圖像識別分割流程圖。
2.3 視覺跟蹤軟件原理
當目標物體被識別以后,視覺系統(tǒng)將調整鏡頭使目標位于視野的中心。一旦物體運動,視覺系統(tǒng)將進行對目標物體的跟蹤。
在機器人視覺跟蹤系統(tǒng)上,采用無定標的視覺跟蹤系統(tǒng)。無定標的視覺跟蹤不需要事先對攝像鏡頭進行定標,而是應用自適應控制方面的原理,在線的實時調整圖像雅可比矩陣。通過二維的圖像特征信息反饋,這種方式對攝像機模型誤差和機器人模型誤差、圖像誤差、圖像噪聲不敏感。基于圖像跟蹤的視覺跟蹤控制系統(tǒng),如圖4.

控制量c為機器人頭部的控制系統(tǒng)。首先把目標放在機器人視野的前方采集到期望的圖像,從期望圖像中抽取期望的特征集,作為視野跟蹤控制系統(tǒng)的期望輸入,從而完成任務需要的視野特征集定義。在實時控制系統(tǒng)中,由機器人的圖像傳感器獲取實時采樣圖像,從中獲取實時特征集,這樣構成一個視野反饋,引導機器人完成跟蹤任務。區(qū)別于圖像的簡單幾何特征,本系統(tǒng)選用的視覺特征集為全局的圖像描述-圖像矩。
根據矩特征變化量與相對位姿變化量之間的關系矩陣,即圖像雅可比矩陣,然后利用推導的圖像雅可比矩陣,設計了視覺跟蹤控制器,完成系統(tǒng)對3D目標物體的平動跟蹤。
3 實驗結果
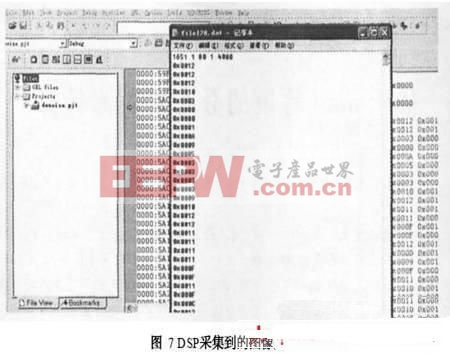
圖5為DSP為clkout腳輸出波形,表明DSP的內部時鐘電路工作正常。圖6的圖像傳感器輸出數據波形證明了圖像傳感器工作正常。圖7的DSP采集到的圖像數據,可以確定整個圖像采集硬件電路工作正常。

4 結 論
針對服務機器人的視覺系統(tǒng),本文通過構建它的硬件系統(tǒng)和軟件系統(tǒng)完成了整個系統(tǒng)的設計。在硬件系統(tǒng)上,采用了CMOS圖像傳感器,CPLD時序控制,異步動態(tài)FIFO的數據緩存,以及高速DSP處理器構成了一個典型的圖像采集系統(tǒng),并調試輸出了圖像信號。在軟件設計上,采用了足球機器人的彩色識別和彩色分割識別技術去完成視覺系統(tǒng)快速準確的識別,采用基于動態(tài)的工作方式以及采用基于圖像的雅可比矩陣的控制原理,去實現(xiàn)自適應補償跟蹤控制系統(tǒng)。




評論