基于MM908E625和Low-G的汽車疲勞駕駛監(jiān)控

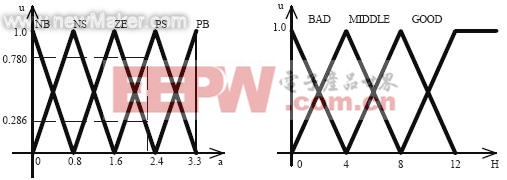
圖(4)加速度a 隸屬度函數(shù)圖 圖(5)駕駛狀態(tài)隸屬度函數(shù)圖
對應(yīng)于油門開度模糊控制規(guī)則庫的建立,與油門開度s,發(fā)動機轉(zhuǎn)速n、車速v 在不同的數(shù)值范圍的取值具有交互性和關(guān)聯(lián)性。規(guī)則庫的建立需要在程序運行中不斷搜集數(shù)據(jù),通過自學習確定方法和模糊規(guī)則的自調(diào)整,在實驗過程中不斷修正和完善。
模糊控制規(guī)則重點處理影響車輛駕駛狀態(tài)的優(yōu)劣“差”和“中”的工作過程。其中,“差”駕駛狀態(tài)的規(guī)則對應(yīng)于油門開度s 分為0,1,2-9 共十段,發(fā)動機轉(zhuǎn)速n 分為1000rpn 、1500rpn-5500rpm 共十段, 車速v 分為60km/h 、70km/h-150km/h 共十段,和加速度劃分成“負大NB”、“負小NS”、“零ZE”、“正小PS”、“正大PB”五個等級,可歸納為有效控制規(guī)則八十六條規(guī)則。
模糊控制規(guī)則(L)公式:如果(IF)油門開度s 為x 段[和(AND)]V[或(OR)]發(fā)動機轉(zhuǎn)速n 為y 段[和(AND)]V[或(OR)]車速v 為z 段,且加速度為等級m,則(THEN)駕駛狀態(tài)為“S”。
3.精確化計算:
對應(yīng)于上述推理方法得到的結(jié)果,結(jié)合車輛正常駕駛時采集的數(shù)據(jù)建立的數(shù)據(jù)庫分析,對加速度等級出現(xiàn)的頻度,根據(jù)輸出模糊子集的隸屬度函數(shù)進行精確化計算,確定車輛駕駛狀態(tài)的優(yōu)劣“差”和“中”,由交互界面提供操作提示和報警。
軟件描述
1.數(shù)據(jù)庫建立:
駕駛狀態(tài)模糊控制器數(shù)據(jù)庫的建立和數(shù)據(jù)更新是本課題設(shè)計的重要部分,汽
車正常駕駛時,系統(tǒng)設(shè)定為連續(xù)駕駛的前兩個小時為正常駕駛,在這段時間內(nèi)監(jiān)控儀的工作是對駕駛員的駕駛習慣進行數(shù)據(jù)搜集,按設(shè)定量化等級作數(shù)據(jù)的線性化量化,對應(yīng)于油門開度、制動踏板位置和方向盤轉(zhuǎn)向軸三種類型的變量的不同量綱,按比例因子對數(shù)據(jù)處理,依據(jù)模糊子集的隸屬度函數(shù)模糊化數(shù)據(jù)。
為了消除大的誤差,在量化級之間采用插值運算,引入權(quán)系數(shù)因子w(.),對于任意一個連續(xù)的測量值通過相鄰的兩個離散的加權(quán)運算得到模糊度的值。在模糊化數(shù)據(jù)建立數(shù)據(jù)庫的基礎(chǔ)上,生成正常駕駛習慣數(shù)學模型,并根據(jù)不斷采集的數(shù)據(jù)進行修正。隨著連續(xù)駕駛時間的增加(大于兩個小時或采集數(shù)據(jù)的變化超出駕駛狀態(tài)監(jiān)控指標),監(jiān)控儀自動進入疲勞駕駛監(jiān)控狀態(tài)。
2.軟件框圖
(1).PC 機程序設(shè)計:
PC 機程序用C 語言編寫,完成數(shù)據(jù)庫的建立和維護、對LIN-BUS 網(wǎng)絡(luò)的管理、模糊控制器算法和規(guī)則的運算、交互界面的輸入輸出控制。軟件框圖如圖(6)所示。

圖(6)PC 機軟件框圖
測量模塊是以MM908E625 單片機為核心的數(shù)據(jù)采集器, 程序用CodeWarrior3.1 CW-HC08 3.0 設(shè)計,測量模塊軟件框圖如圖(7)所示。
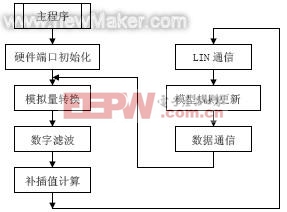
圖(7)測量模塊軟件框圖
智能控制技術(shù)應(yīng)用于汽車疲勞駕駛監(jiān)控課題是一個相當復雜和具有相當難度的研究方向,通過對LIN-BUS 網(wǎng)絡(luò)的研究,以MM908E625、Low-G 加速度傳感器和其他傳感器與嵌入式PC 機建立起這樣一個硬件平臺,實現(xiàn)對汽車駕駛狀態(tài)在正常駕駛、短距離駕駛、短時間駕駛的數(shù)據(jù)庫的建立,規(guī)則庫數(shù)據(jù)的修正,疲勞駕駛狀態(tài)監(jiān)控。對油門開度、制動踏板位置和方向盤轉(zhuǎn)向軸等三種主要影響駕駛狀態(tài)的因數(shù),設(shè)計出模糊控制器,從理論和硬件實現(xiàn)兩方面做了有益的探討,雖然離實際應(yīng)用和產(chǎn)業(yè)化有一定的距離,但是為進一步完善該系統(tǒng)的設(shè)計打下了良好的基礎(chǔ)。(end)





評論