一種嵌入式汽車數字儀表設計方案

主程序在完成初始化(硬件初始化ARMtarge-tInit()、μC/OS-II初始化OSInit()、建立消息隊列等)工作后依次創建各任務,然后調用OSStart()啟動操作系統,啟動時鐘ARMTargetStart()。在μC/OS-II中,各任務都是并發的,但優先級不同,擁有各自的任務堆棧,不同任務間通過消息隊列和信號量進行通信和共享數據。任務采用無限循環結構,各任務通過延時或者等待信號量和消息隊列來放棄CPU的使用權,這樣在時鐘脈沖到來時產生中斷切換任務,系統轉而運行準備就緒的高優先級任務,當延時或信號量和消息隊列到來時,任務再次運行。系統采用TimerO定時中斷作為系統時鐘脈沖控制器,并在需要的任務中建立信號量。系統任務如下:
1)車速脈沖測量任務:脈沖信號接EINTO,使用定時器1定時,測量t時間內脈沖數,并將數據發送到消息隊列。
2)CAN總線任務:CAN總線任務等待中斷服務程序發送,接收CAN總線數據的信號量,獲得CPU使用權后,CAN總線任務處理CAN總線數據并將其發送到消息隊列,并再次等待接收信號量。
3)水溫和油量采樣任務:定時采樣模擬量,并將采樣到的模擬量數值發送到消息隊列。
4)開關量處理任務:根據開關量的狀態控制LED點亮或熄滅,延時。
5)里程記錄及LCD顯示任務:當車速脈沖值累加至0.1 km計數值,向本任務發出信號量,任務獲得信號量后進入準備就緒狀態,在任務調度時獲得CPU的使用權,顯示并記錄里程信息,運行后繼續等待接收信號量。
6)步進電機驅動任務:首先等待消息隊列,再根據送出消息的任務識別出信息內容,根據隊列中的數據驅動步進電機旋轉相應的步數,運行后再次等待隊列中的消息。本任務賦予第2高優先級。
7)WDT任務:用于監控,提高系統的可靠性,任務優先級最高,延時。
3.4 CAN總線任務及步進電機驅動任務流程
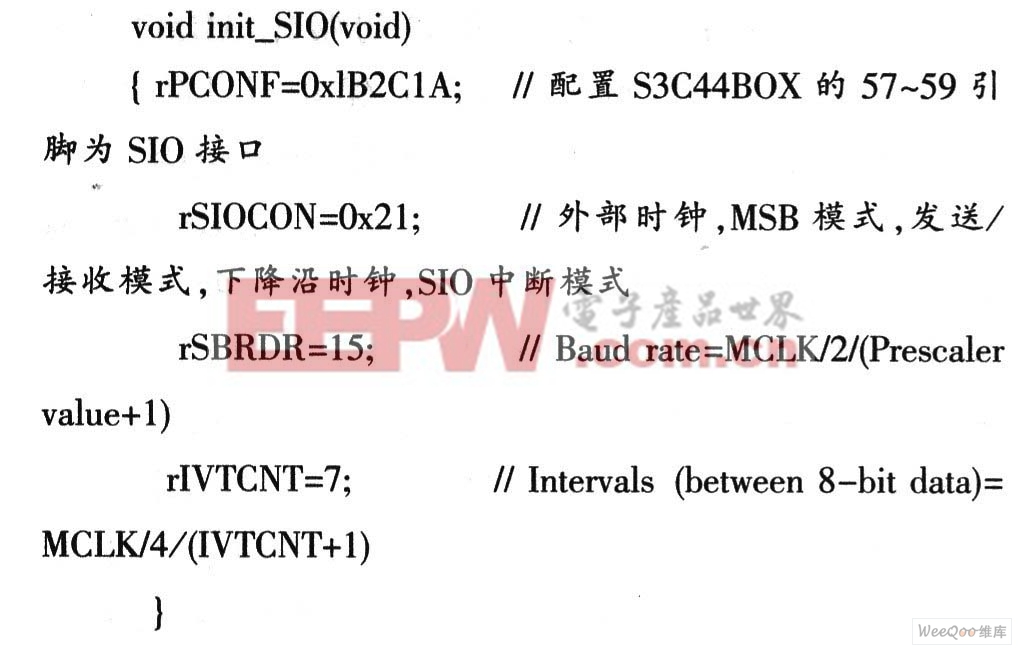
由于S3C44BOX的SIO接口的引腳與標準I/O端口復用,因此首先必須設置S3C44BOX的引腳57~引腳59為SIO接口,然后再通過配置SIO模塊對應的寄存器,使得SIO時序與MCP2510的SPI接口協議一致,可通過以下初始化SIO函數實現。
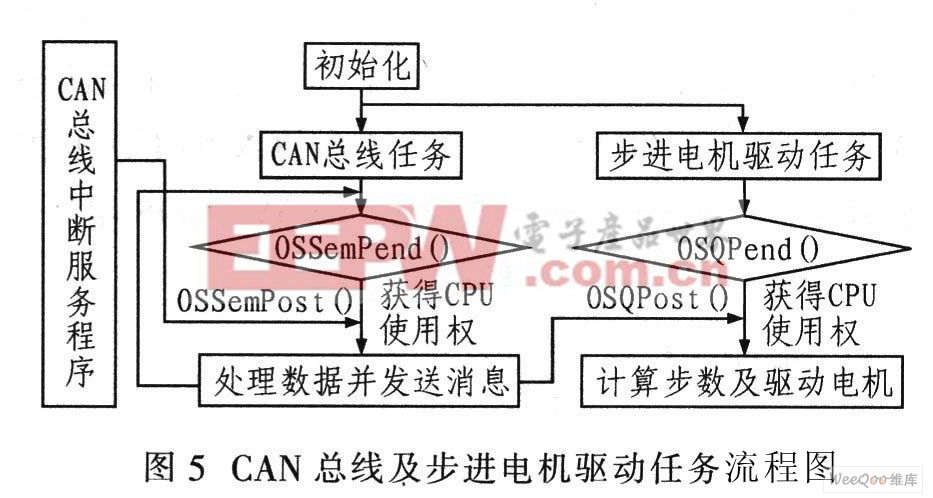
如圖5所示,初始化完成后,主程序發起CAN總線任務及步進電機驅動任務,兩個任務先后進入等待信號量和等待消息隊列,CAN總線發生中斷后,中斷服務程序釋放信號量,使得CAN總線任務進入就緒狀態,在其獲得CPU控制權后,處理數據,然后將數據發送至消息隊列,從而使得步進電機驅動任務進入就緒狀態,電機任務通過任務調用獲得CPU使用權,再根據消息隊列中的數據計算出所需的驅動步數,驅動電機旋轉。
4 結束語
采用S3C44BOX與嵌入式實時操作系統μC/OS_II設計了一款高精度高、高靈敏度、工作穩定的嵌入式總線汽車數字儀表。S3C44BOX資源豐富、執行速度快,能擴展很多種功能,如IC卡、GPS、黑匣子等;加之嵌入式實時操作系統簡化了應用程序,可高效實時地調用系統任務,因此本汽車數字儀表系統能夠很好地解決汽車儀表邁向綜合信息化的問題。

評論